 Русский
Русский English
EnglishCryptocurrencies:
8589 /
Markets: 116203
Market Cap: $ 2 444 505 039 380 /
24h Vol: $ 111 150 352 801 /
BTC
Dominance: 58.308752832465%
Как мы тестируем беспилотные автомобили с помощью симуляций
Всем привет! Это Александр Чистяков из команды беспилотных автомобилей Яндекса. Мой доклад посвящён симуляторам: что это, зачем, как это устроено изнутри и какие в симуляции есть подводные камни, неожиданные парадоксы. Также расскажу, с помощью каких алгоритмических или архитектурных решений мы со всеми этими парадоксами боремся.
Как устроен беспилотный автомобиль
Автомобили Яндекса уже проехали почти 30 миллионов километров по самым разным дорогам, перевезли десятки тысяч пассажиров, а роботы‑доставщики привезли сотни тысяч заказов и каждый год наши технологии продолжают совершенствоваться.
Сперва расскажу, как наши автомобили устроены. С виду это обычные легковые автомобили, на которые навешали кучу датчиков и сенсоров: радары, лидары, камеры, в багажник установили вычислители с ГПУ. И выпустили на дороги. Вот как это выглядит:
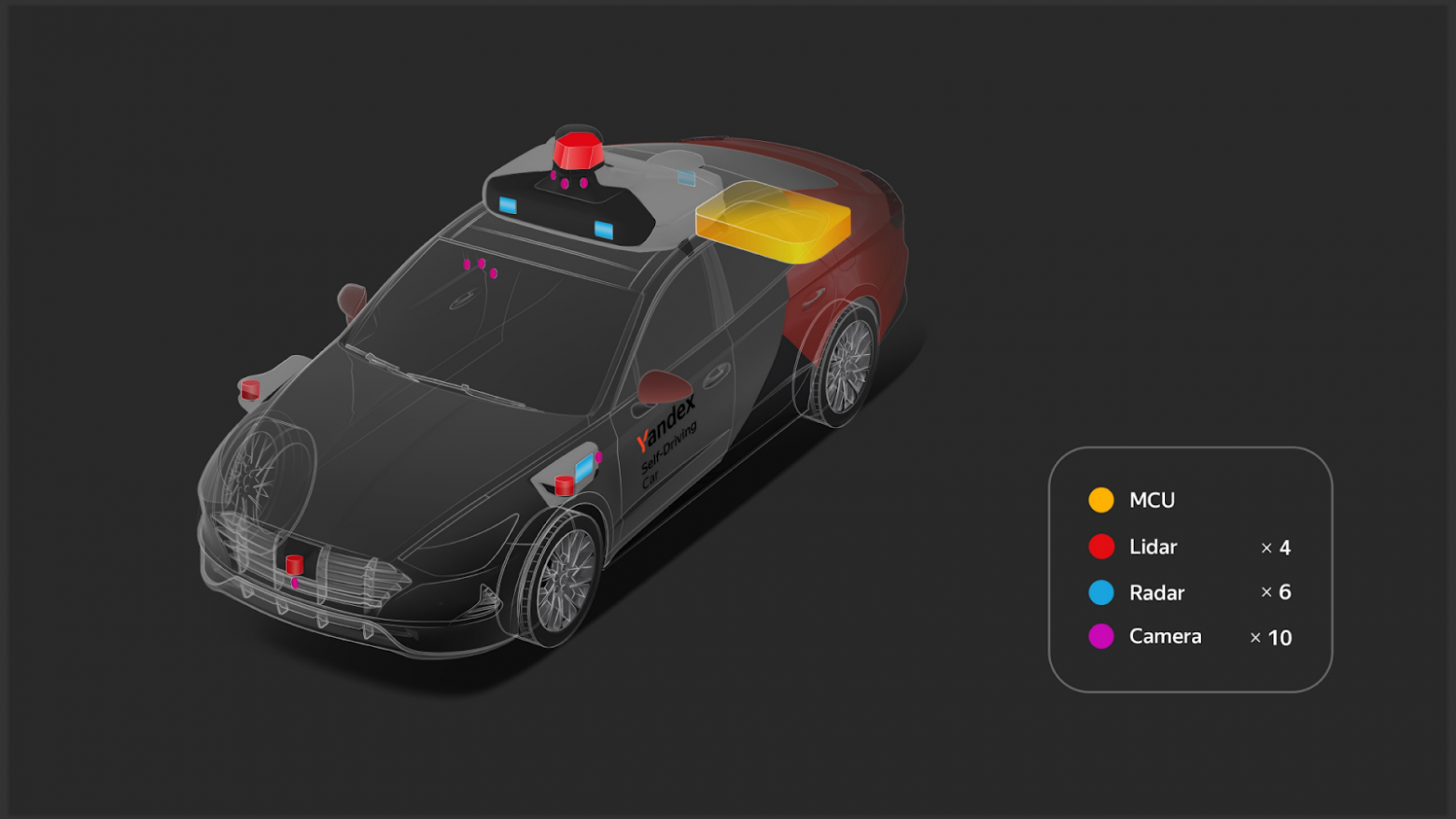
А вот как наш автомобиль видит окружающий мир:
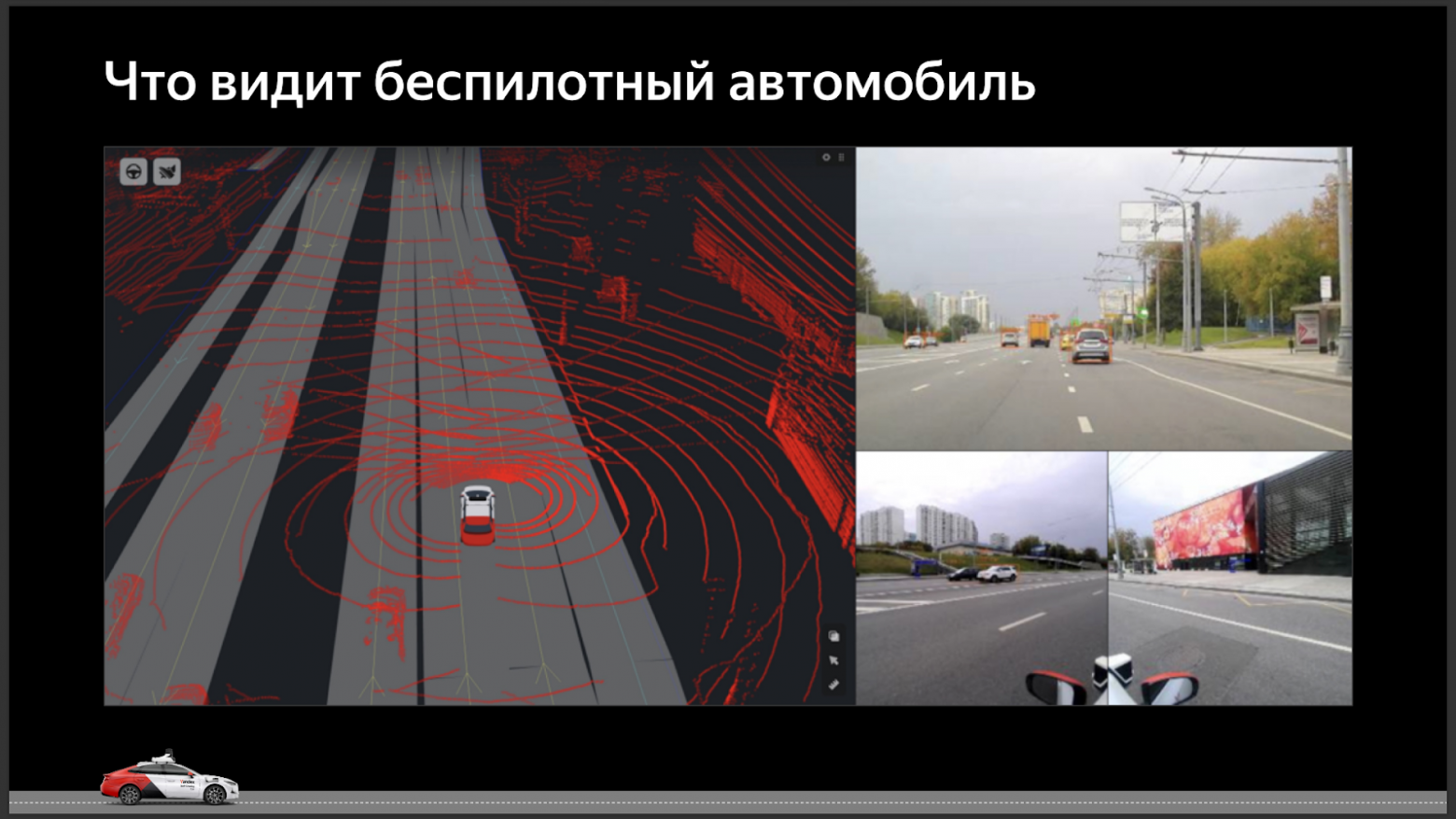
Слева — лидарные облака. Лидар — это такая вращающаяся лазерная указка, которая нащупывает расстояние до соседних объектов и по форме пытается узнатьь, что это за предмет. Лидар «видит» даже ночью, в полной темноте.
Но лидары не могут распознать дорожные знаки, сигналы поворотников, стоп‑сигналы, дорожную разметку. Поэтому по периметру автомобиля есть ещё и камеры.
Весь этот огромный поток данных с сенсоров проходит сквозь здоровенный пайплайн компьютерного зрения из сегментации, детекции и трекинга. На выходе мы получаем вот такую векторную картинку, как на левой половинке слайда.
Грубо говоря, мы считаем все машины параллелепипедами с какой‑то метаинформацией. Например, включены ли поворотник или аварийная мигалка.
Пешеходы для нас — это условные столбики. Мы также распознаём другие объекты: дорожные знаки, пешеходные переходы, разметку, шлагбаумы — всё, с чем обычный автомобилист взаимодействует на проезжей части.
Вся эта конструкция ездит по городу, получает векторное представление, отправляет его в поведенческую компоненту беспилотного автомобиля, понимает, как в этой ситуации проложить маршрут, чтобы достигнуть цели. И потом — что надо сделать, чтобы маршрут воплотить: когда нажать на газ, как повернуть руль и так далее.
Зачем нужен симулятор
Пока почти во всех автомобилях, которые мы испытываем в городе, на водительском или переднем пассажирском месте сидит страхующий водитель. Если что‑то пойдёт не так, этот человек вмешается и поможет нашей машине.
Каждый сложный случай мы тщательно разбираем, чтобы исправить. И первый вопрос, на который необходимо дать ответ: а что было бы, если бы водитель не вмешался?
Мы берём те сборку и ПО автомобиля, которые были в момент вмешательства, и подключаем их к «Матрице». Начинаем перепроигрывать записи со всех камер, лидаров. Далее снова подаём эту информацию автомобилю на вход, заново распознаём окружающий мир, заново отправляем векторную картинку в логику поведения и не вмешиваемся, даём алгоритму ехать так, как он сам этого хотел.
А дальше сравниваем с тем, что теперь получилось.
Слева — повторение записи с предыдущего слайда, а справа — то, как поехал бы алгоритм без вмешательства водителя.
С одной стороны, аварии не случилось бы. Странно, да? Причём мне очень нравится, что беспилотный автомобиль нашёл такую траекторию, чтобы и не выехать на встречную полосу, и просто в сантиметре разминуться с этой выезжающей машиной. Но если бы вы сидели в такси, вам было бы страшно в этот момент. Хочется как‑то это исправлять. Но как?
Тут надо уточнить, что таких вмешательств водителя на самом деле мало. И для нас это проблема с двух сторон. Первая: водителю всё ещё иногда приходится вмешиваться, мы не можем совсем его убрать, чтобы сделать наш автомобиль абсолютно самостоятельным. Но, с другой стороны, проблем настолько мало, что нам очень сложно улучшать технологию.
Приходится проезжать безумное количество километров, чтобы хоть как‑то статистически значимо оценить улучшения в релизах. Это долго, дорого и крайне непривычно для обычных циклов программной разработки.
За годы существования беспилотных автомобилей мы накопили десятки тысяч разных интересных сложных сцен: вмешательство водителей, просто проезд каких‑то сложных участков, сложных перекрёстков, перестроения и так далее.
Мы можем на этих сценах концентрированно прогнать любой новый релиз. Например, в какой‑то старой версии мы при повороте влево иногда могли не учитывать едущую на нас машину. Вот, например, для сравнения слева визуализация аварии в симуляторе. Сейчас эта проблема исправлена: в той же самой ситуации автомобиль пропускает машину. Пропустили и справа спокойно поехали дальше.
Таких сцен мы можем накопить столько, сколько нам нужно для тестирования любой новой фичи. Например, мы можем также по другим сценам понять, что при повороте налево надо учитывать не только едущий навстречу транспорт, но и тот, что следует за нами.
Как устроен симулятор
Самые внимательные, наверное, уже заметили, что слева и справа иногда машинки едут чуть по‑разному. И это нормально. На самом деле мы знаем только то, как агенты вокруг нас ехали в реальном мире. Но, как только мы меняем поведение беспилотного автомобиля, например убираем вмешательство водителя или тестируем какую‑то новую логику перестроений, в ответ на это должны по‑другому начать вести себя окружающие водители. Мы проехали уже десятки миллионов километров и знаем, как окружающие водители обычно реагируют на наши всевозможные действия.
Вот ещё пример. Слева и справа — симуляция двух релизов. На левой симуляции мы отстали от нашего прототипа, по факту не решаемся выехать на загруженную дорогу, а справа мы выезжаем на эту дорогу и даже немного опережаем наш прототип.
На левой картинке машины, которые стояли за нами, чуть‑чуть раздвоились, от них отделились серые «привиденьица» — это то, где машины были в реальности. Теперь же мы в симуляции понимаем, что обычно сквозь нас машины не едут. У них включается специальная ML‑модель, которая моделирует поведение окружающих агентов, и они подстраиваются под наши новые траектории.
Или, например, машины стоят и ждут в пробке, пешеходы слева не решаются выйти на зебру, потому что мы им её перегородили. Справа же, наоборот, мы уехали чуть вперёд, и вот этот зеленоватый агент начинает поворачивать по более удобной для него траектории.
Чтобы лучше понять концепцию, которая лежит в устройстве симулятора, полезно обратить внимание и на робота‑доставщика. Если кто‑то с ним ещё не сталкивался, это такая милая коробочка на шести колёсах на специальной подвеске — катается по городу и доставляет, например, продукты из Лавки.
Его проблема в том, что он маленький. На роботакси на крыше стоит куча сенсоров: камеры, лидары. И, например, в пробке мы можем заглянуть за соседнюю машину, понять её размеры, прощупать слепые зоны. А робот — где‑то по пояс человеку. Когда он сквозь толпу везёт свои товары, разглядеть окружающий мир сквозь ноги людей для него сложно.
Выглядит это как-то так:
Вот едет наш робот где‑то в районе Парка культуры, везёт доставку. Слева его начинает подпирать чёрная машина. Следите за левой частью — это то, как роботёнок видит мир. Вот есть синяя коробка, она исчезла, появилась какая‑то новая, красная.
Начался какой‑то хаос. И что происходит на камерах? Всю левую камеру нам закрыли бампером, спереди всё застлано выхлопными газами. Робот стоит в панике, не понимает, что происходит. Потом машина уедет, дым рассеется, робот придёт в норму и продолжит свой маршрут.
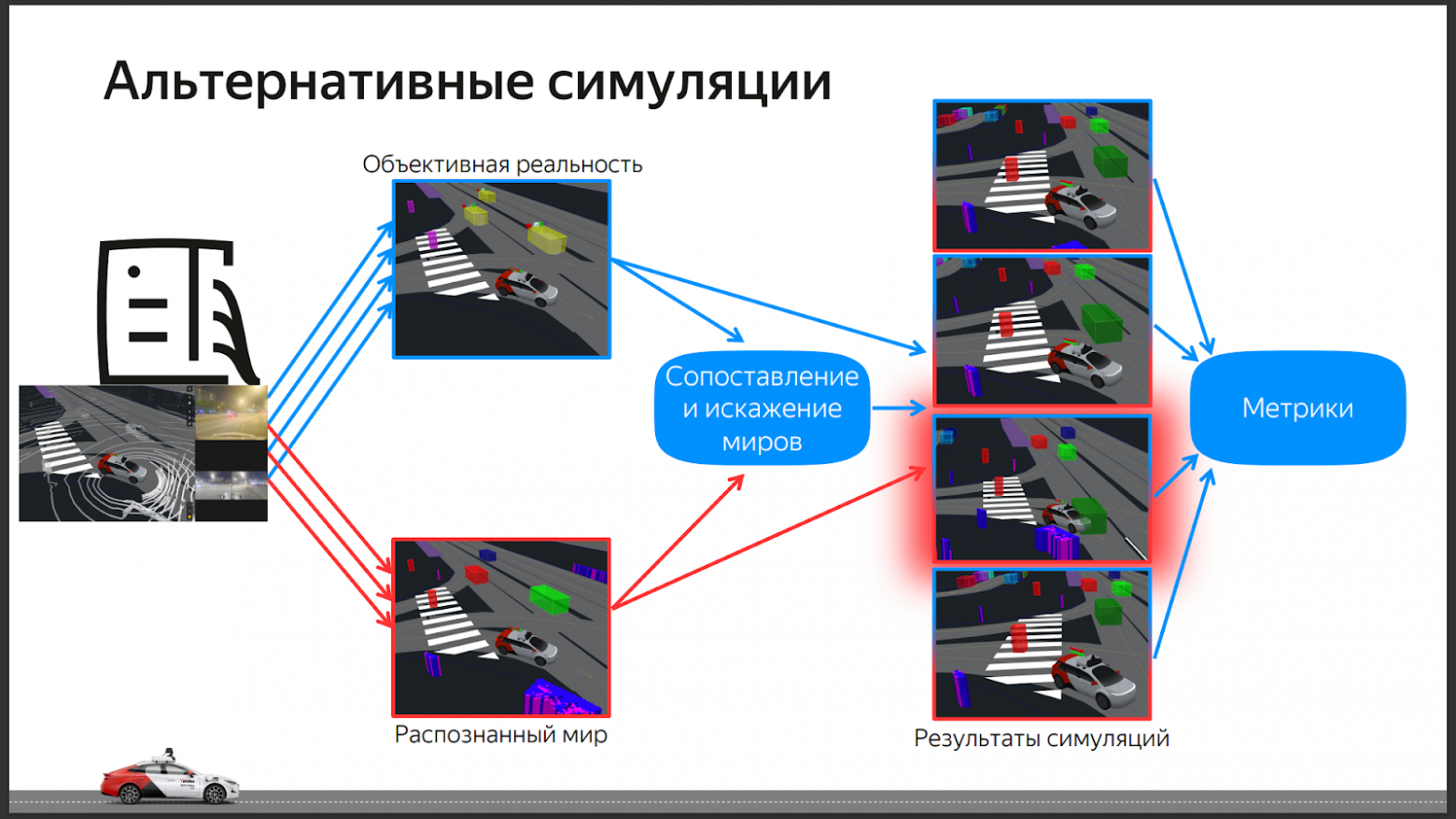
Чтобы симулировать такую сцену, нам надо понять, что именно надо симулировать. Мы пришли к концепции объективной реальности. Ниже — верхнеуровневая схема того, как вообще устроен симулятор. Красным цветом выделен тот кусок, про который я уже рассказал.

Для симуляции мы берём записи с камер, лидаров, прочих сенсоров, перепрогоняем их через пайплайн компьютерного зрения, распознаём мир и этот мир отправляем уже в кубик «Симуляция», где работает поведенческий кусок, который как‑то решает ехать.
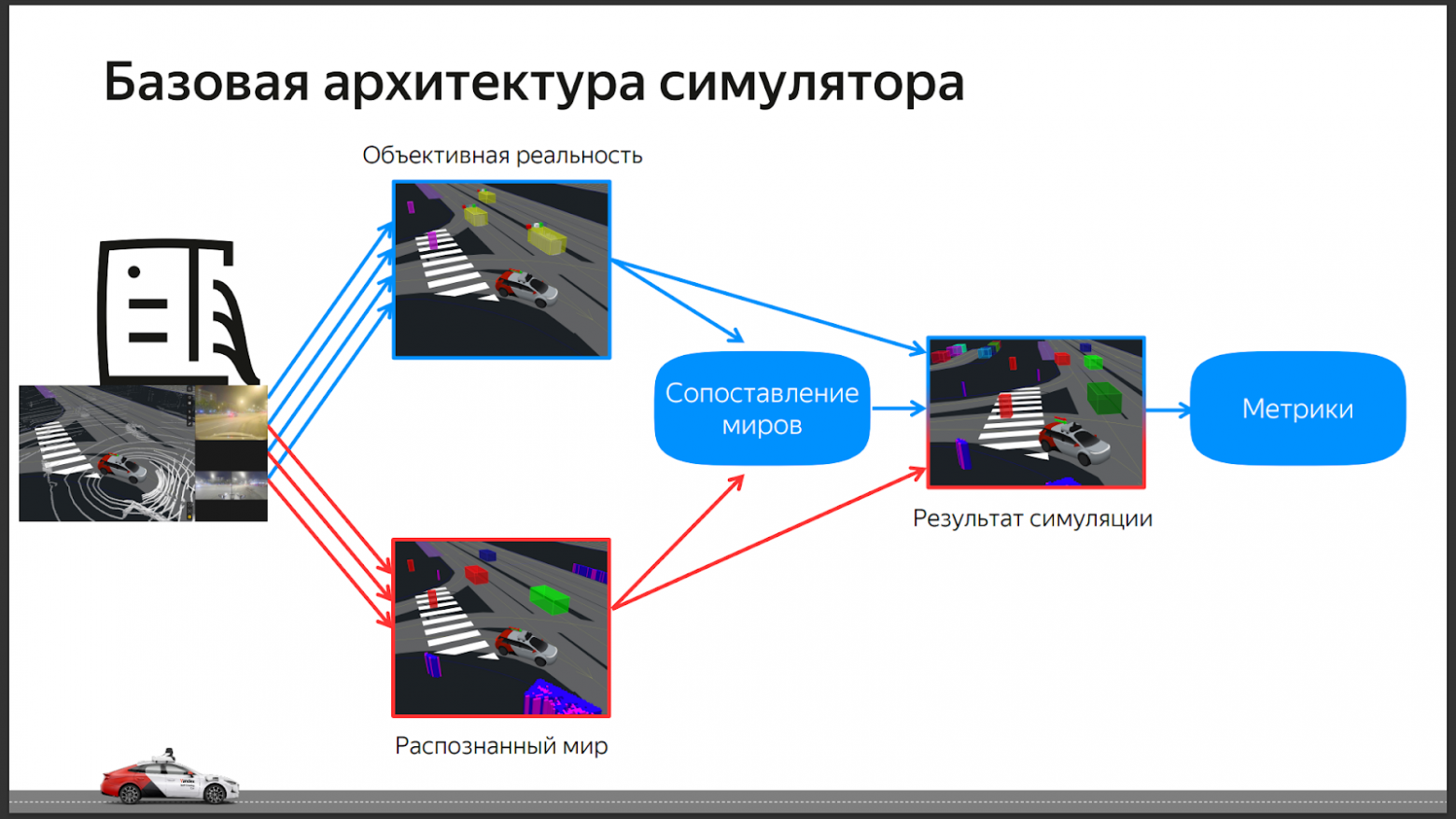
Особенность этого пайплайна: он должен работать так же, как он будет работать на реальной машине. Условно: в режиме реального времени, потоково, пришла новая лидарная детекция, надо срочно её распознать, понять, что происходит, отправить в поведение, чтобы как можно быстрее принять ответные меры.
Параллельно с этим мы можем не спеша, но, главное, максимально точно понять, что же на самом деле в мире творилось.
Какие у нас здесь есть хаки?
Мы можем взять какую‑то более тяжёлую модель компьютерного зрения, которая на настоящий беспилотник не влезала бы по перформансу.
Также мы можем «заглянуть в будущее». Например, в какой‑то момент где‑то на горизонте в тумане появился серый непонятный силуэт, мы пролистаем видео вперёд, поймём, что это был автобус и габариты его не менялись. То есть в будущем мы можем понимать заранее, что за серый силуэт с похожими параметрами перед нами.
Если вдруг в какой‑то сцене никакие наши алгоритмы не справляются, мы можем привлечь к разметке краудсорсинг и попросить людей доописать, что происходило на сцене. Полезно, если появляется какая‑то сложная строительная техника, которую вообще никогда не видели.
Как всё это выглядит для машинки? Вот такая картинка из серии «найдите десять различий»:
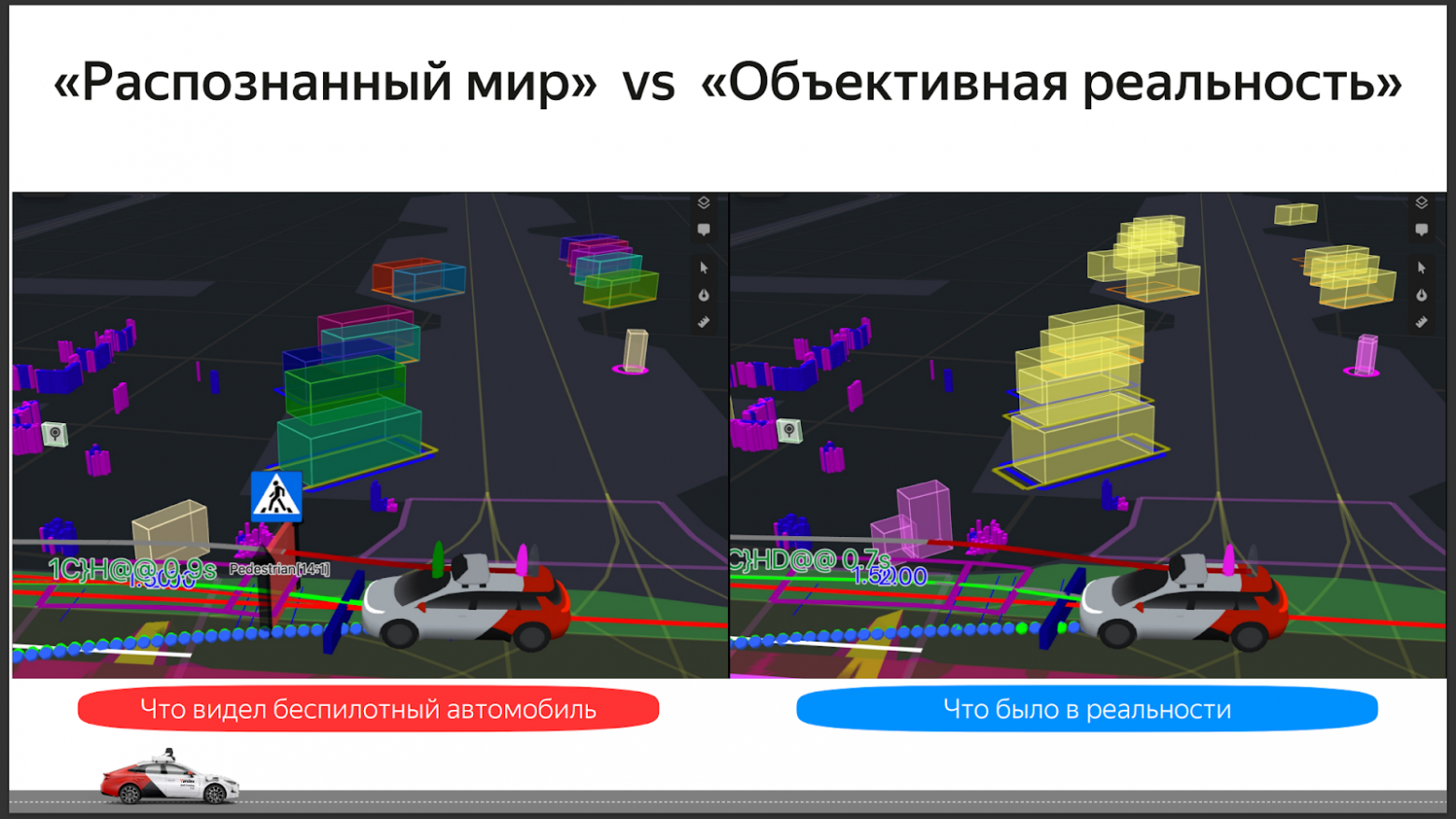
Слева — то, как этот момент видит сам беспилотный автомобиль, справа — то, что мы записали в объективную реальность.
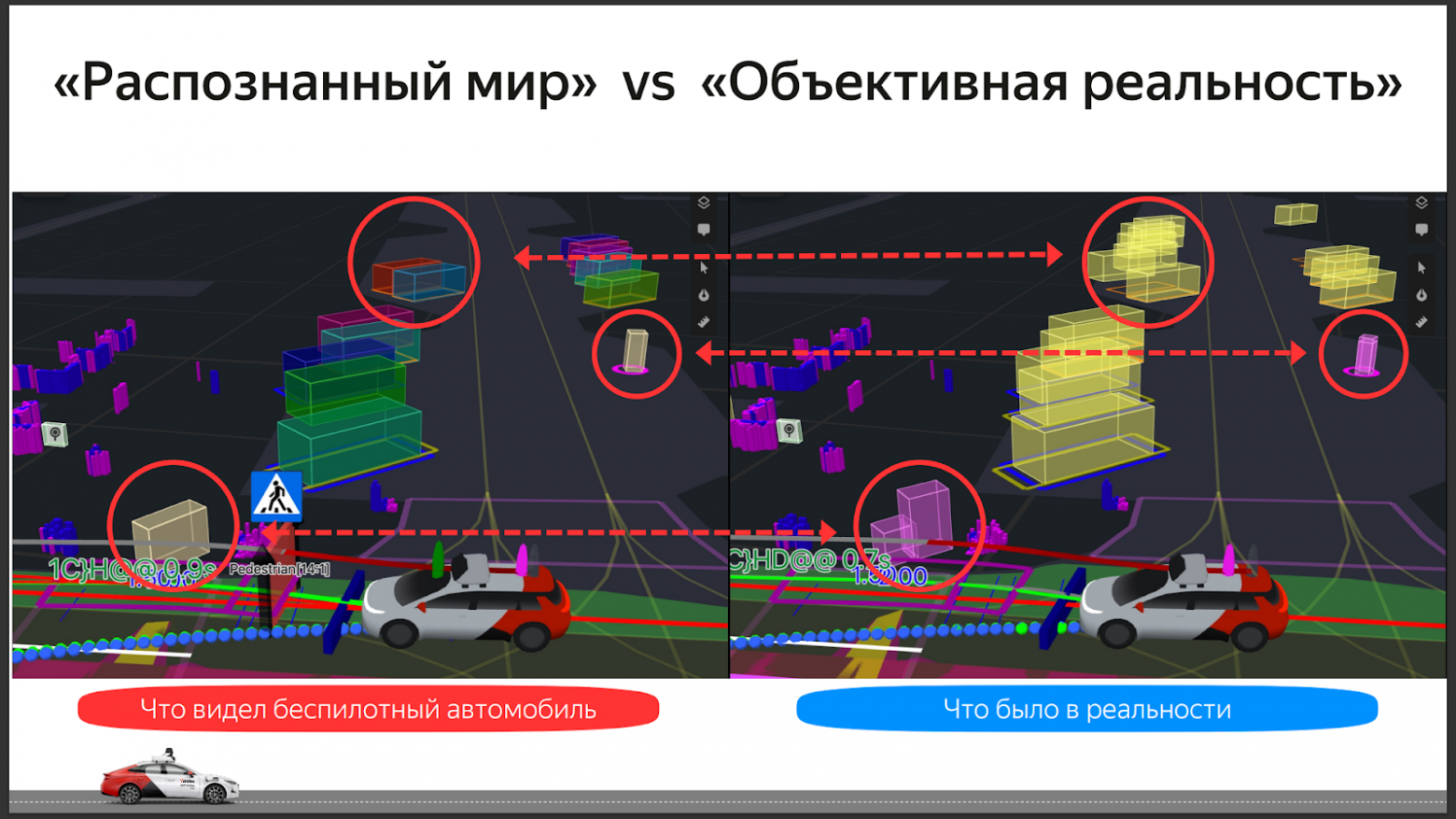
Верхняя строчка — это машины на парковке. В проезде мы видим только самые ближние из них. Потом мы посмотрели внимательно и поняли, что там ещё ряд машин на парковке.
Вторая строчка. В проезде мы видим пешехода, стоящего на автобусной остановке. В объективной реальности мы взглянули внимательнее и поняли, что пешеходов там два. И вот в симуляции нам бы надо было учитывать второго пешехода. Например, он мог выходить на проезжую часть.
Наконец, третья строчка. В проезде мы видим околопешеходный объект с колёсами — похоже на велосипедиста или самокатчика. В объективной реальности мы распарсили и поняли, что это была мама с коляской. Два потенциально отделимых объекта со своими особенностями передвижения в городской среде, какими‑то особенностями взаимодействия с окружающим миром. Соответственно, реагировать на них нужно иначе.
Эффект бабочки и параллельные миры
Вся наша симуляция работает. Но к нам периодически приходили разработчики с такой жалобой: «Смотрите, я тут тестирую какую‑то свою фичу, и вот на этой сцене слева и справа две версии — с фичей и без фичи. Беспилотный автомобиль‑то едет одинаково. Но вот ваши умные агенты поехали как‑то по‑разному, в итоге меня спровоцировали на новые действия, а мне это ухудшило метрики. Всё неправильно делаете».
Мы стали разбираться, что происходит. На самом деле во всей этой конструкции симулятора — что в самом симуляторе, что в поведении беспилотника — есть много сложных глубоких нейронных моделей, которые очень неустойчивы даже к небольшим отклонениям входов.
И на самом деле там, где внешне всё выглядело одинаково, траектория беспилотника могла начать отличаться буквально на один сантиметр. И этот сантиметр по‑другому заходил на вход какой‑то модели, выход модели отклонялся уже на два сантиметра, эти два сантиметра влияли на что‑то следующее в пайплайнах, было отклонение уже на пять сантиметров, десять, метр.
Поскольку у нас каждый такт симуляции зависит от всего предыдущего, за несколько секунд симуляция разваливалась и начиналось какое‑то совершенно другое развитие событий в этом мире. И срабатывал так называемый эффект бабочки.
Мы долго думали, как с этим бороться, а потом поняли, что бороться не надо. Ведь мир непредсказуем. Поэтому мы решили: давайте мы будем эксплуатировать этот эффект бабочки и умышленно вносить искажения как в распознанный мир, так и в объективную реальность.
В итоге из одной сцены мы можем наплодить четыре, десять, сто параллельных вселенных, в которых как‑то по‑разному начнут развиваться события. И заметить, что в одной из вариаций, например, происходит какая‑то авария. Соответственно, часто сцены бывают у нас какие‑то редкие, их очень тяжело воспроизвести где‑то на реальных дорогах, а тут мы сможем как раз по‑разному варьировать сцены, получить из одной сцены целый датасет, на котором уже внимательно следить за улучшением каких‑то характеристик или поведения наших беспилотников.
Не всегда хватает каких‑то автоматических флуктуаций. Иногда мы не хотим дожидаться появления какой‑то сцены в реальном мире и можем захотеть руками что‑то тоже потюнить — например, взять сцену и в ней переставить пешехода или добавить машину.
Как измерить качество симуляции
Всё это время я рассказывал про то, как измерить качество самого беспилотника с помощью симулятора. Но нам, как команде разработки симуляции, важно понимать, насколько улучшается наш собственный продукт.
И тут всё не так просто. Для беспилотника есть понятные продуктовые метрики. Доехал до цели — молодец. Врезался во что‑то по пути — не молодец. Если мы начнём что‑то такое же улучшать в нашем симуляторе, то придём к странным эффектам.
Например, мы начнём хвалить симулятор за то, что в нём стало меньше аварийных ситуаций. Тогда получится идеальный симулятор, в первую секунду в нём все агенты будут бросаться врассыпную, лишь бы не задеть беспилотник, ни с кем не столкнуться. Если мы будем увеличивать количество аварий — ведь мы же хотим в симуляции что‑то промоделировать, сгенерировать сложные случаи, — тогда у нас агенты начнут устраивать какой‑то «кармагеддон», гоняться за беспилотником, таранить его. Это не тот мир, к которому мы готовим наши машины. Что делать?
Давайте проникнемся, представим себя разработчиками. Здесь будет снова две симуляции, но в них беспилотник едет абсолютно одинаково. А то, как повёл себя симулятор в ответ на встраивание беспилотника перед ним, различается.
На левой сцене водитель тормозит, не спеша начинает двигаться за беспилотным автомобилем и ждёт, когда ему освободят дорогу. На правой сцене водитель видит, что дорога пустая, уходит в соседний ряд и, не сбавляя скорости, едет дальше по своим делам. «Привиденьице» — это то, как машина ехала тогда в реальности.
Мы столкнулись с проблемой, что дошли до того состояния качества симулятора, когда над каждым следующим улучшением мы уже сами начнём спорить. Включается субъективизм: мы не понимаем, правда ли здесь стало лучше. Приходится отсматривать какое‑то немыслимое количество сцен, чтобы хоть как‑то прийти к соглашению, какая из ML‑моделей лучше. Хотелось от этого избавляться и объективно оценивать качество.
Что мы сделали? Использовали прекрасную идею из генеративных моделей — дискриминатор.
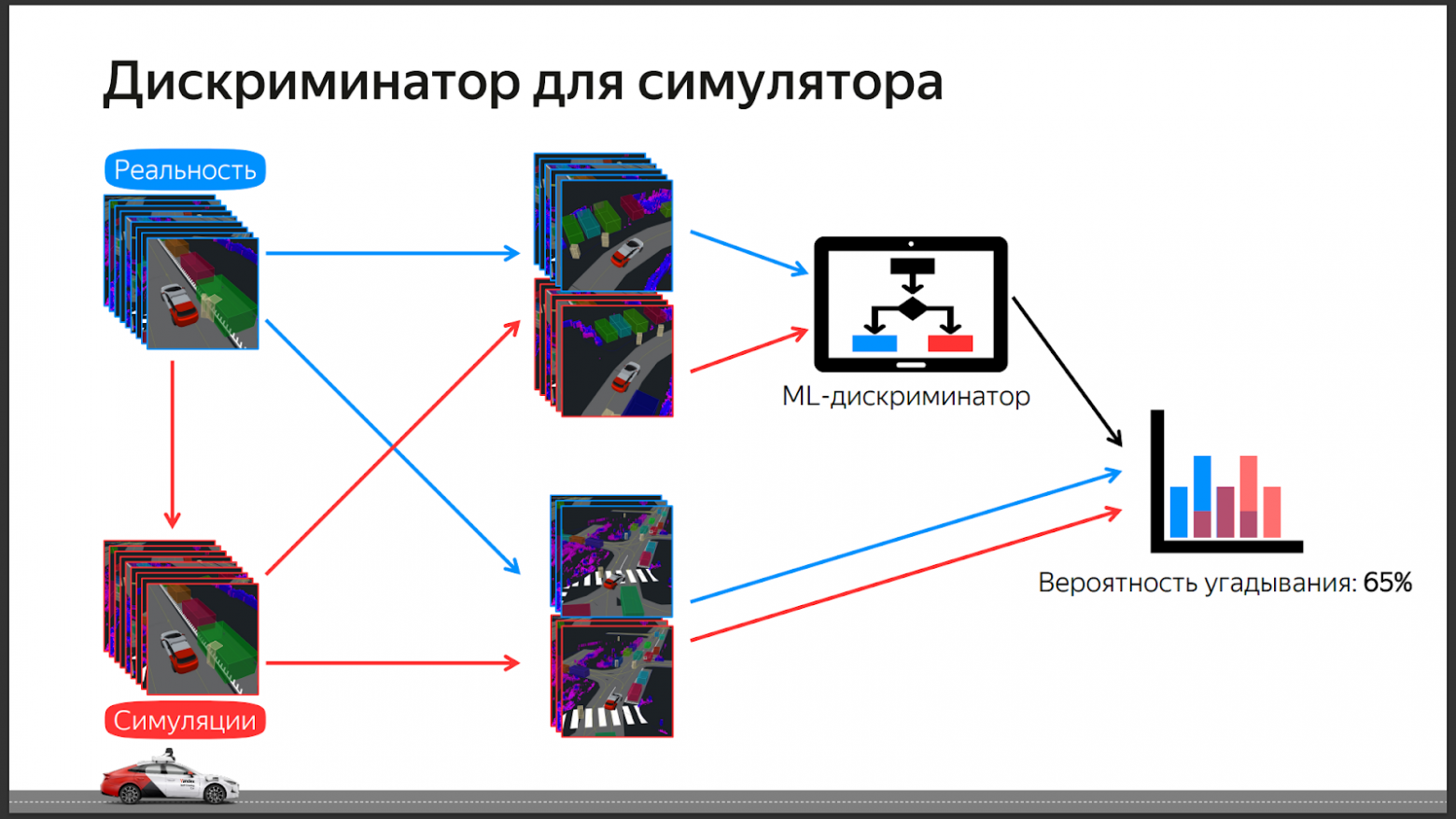
У нас есть десятки, сотни тысяч разных сцен. Мы можем запустить их все в нашем симуляторе. Возможно, мы внесём какие‑то искажения, чтобы полностью не повторить сцену, а спровоцировать какие‑то новые поведения агентов, беспилотных автомобилей. На части пар таких сцен «реальность — симуляция» обучим МL‑модель, которая будет угадывать, что из этого реальность. На оставшейся части пар протестируем качество этой модели. И поймём, в какой доле случаев модель угадала, что из этого реальность.
Если бы наш симулятор был идеальным, то у модели не было бы шансов угадать, что из этого реальность. Если бы симулятор явно выдавал себя, то модель легко зацепилась бы за какие‑то утечки и, соответственно, почти в 100% случаев угадывала бы.
Понятно, что здесь по‑разному можно считать метрику, но сейчас у нас на дашбордах вероятность угадывания чуть больше 60%. Ещё не идеально, но и не всё так плохо.
Таким образом, у нас появилась объективная численная метрика, которую от релиза к релизу можно считать, и можно сравнивать, где она меньше. И теперь мы можем ещё применять к этой ML‑модели специальные методы реверс‑инжиниринга, чтобы понимать, за что она цепляется и что нам надо исправлять в первую очередь в симуляторе.
Открытые проблемы симуляции
Есть ещё много проблем. Одна из них — сохранение намерений агентов из сцены.
Беспилотный автомобиль выехал неудачно на перекрёсток и перегородил путь поворачивающей налево машине. В симуляции мы ещё дальше выезжаем на этот перекрёсток, совсем перегораживаем путь той машине. И смотрите на синюю машину. «Привиденьице» поворачивает налево, водитель синей машины думает: «Там всё занято, поеду прямо». Если не знать, что же было тогда в реальности, выглядит достаточно реалистично.
Мы добавляли этот кейс в наши пулы, тесты, чтобы проверить как раз разъезд с поворачивающей машиной, а тут тест сломан. Соответственно, дело у нас не только в реалистичности, но и в каких‑то других, более скрытых от понимания вещах.
Механика симуляции возникает в самых разных областях. И принципы, которыми я сегодня поделился, везде общие.
Как бы вы ни продумывали систему ручных тестов, в реальности вы столкнётесь с кейсами, о которых вы раньше не думали, и они будут сложнее, чем вы изначально пытались описать.
Когда будете улучшать алгоритмы и повторять их в каких‑то сценах из реальности, ваша реальность должна будет уметь адаптироваться к этим новым алгоритмам и делать это правдоподобно.
Алгоритмы при запуске никогда не будут видеть настоящий мир. Они будут видеть какие‑то свои входные сигналы. Но мир сложнее, и это надо как‑то учитывать. Более того, вы сами знаете, что мир неопределёнен.
Неопределённостью мира можно пользоваться, чтобы с помощью порождения мультивселенных протестировать все возможные варианты срабатывания ваших алгоритмов.
Очень часто замерить качество системы тестирования гораздо сложнее, чем качество самого тестируемого объекта.
Надеюсь, какие‑то из идей будут вам полезны.
-
 22.01.26 07:48
Kelvin Alfons
22.01.26 07:48
Kelvin Alfons
Hello everyone. I’d like to share my personal experience from one of the most challenging times in my life. I’m based in Sydney, Australia, and on November 13, 2025, I fell victim to a fraudulent cryptocurrency investment platform that promised substantial financial growth. Believing their claims, I invested a total of $220,000 with the expectation of earning solid returns. However, when I attempted to withdraw my funds, all communication abruptly stopped. My calls were ignored, my emails went unanswered, and I was left feeling completely powerless. Like many others, I had heard that Bitcoin transactions are impossible to trace, so I assumed my money was lost forever. After some time, I discovered information about GREAT WHIP RECOVERY CYBER SERVICES, a reputable digital asset recovery firm. I decided to reach out to them, and to my astonishment, they were able to help me recover the full amount I had lost. I’m sharing my story in the hope that it may help someone else who is going through a similar situation and looking for support. Their contact is, Website: https://greatwhiprecoveryc.wixsite.com/greatwhip-site Email:[email protected] Call: +1(406)2729101
-
22.01.26 07:50
Kelvin Alfons
Hello everyone. I’d like to share my personal experience from one of the most challenging times in my life. I’m based in Sydney, Australia, and on November 13, 2025, I fell victim to a fraudulent cryptocurrency investment platform that promised substantial financial growth. Believing their claims, I invested a total of $220,000 with the expectation of earning solid returns. However, when I attempted to withdraw my funds, all communication abruptly stopped. My calls were ignored, my emails went unanswered, and I was left feeling completely powerless. Like many others, I had heard that Bitcoin transactions are impossible to trace, so I assumed my money was lost forever. After some time, I discovered information about GREAT WHIP RECOVERY CYBER SERVICES, a reputable digital asset recovery firm. I decided to reach out to them, and to my astonishment, they were able to help me recover the full amount I had lost. I’m sharing my story in the hope that it may help someone else who is going through a similar situation and looking for support. Their contact is, Website: https://greatwhiprecoveryc.wixsite.com/greatwhip-site Email:[email protected] Call: +1(406)2729101
-
 22.01.26 10:42
Tonerdomark
22.01.26 10:42
Tonerdomark
I got my money back from the Elon Musk scam. It cost me over 1 BTC and $55,000 in Dogecoin. Scammers vowed to double investments. Their sites seemed real. Fraud was tough to catch early. They hooked me with fast doubles in weeks or months. Videos showed Musk promising giveaways and gains. I bought in. I sent Bitcoin and Dogecoin in bits at first. Small sends worked. Then I wired my full savings. It vanished quick. No answers came. Bank account empty. Bills piled up. Loans covered rent and food. Sleep fled. Stress hit hard. Life crumbled. A friend spotted my trouble. He told of his scam loss last year. Same old plays. He pointed me to Sylvester Bryant, a recovery expert. Email Yt7cracker@gmail. com. WhatsApp +1 512 577 7957 or +44 7428 662701. Sylvester acted fast. He tracked blockchain trails. Dealt with exchanges. Outsmarted the scammers. In weeks, my Bitcoin came back. Even their phony profits too. Debts gone. Life back on track. Got hit? Contact him now.
-
 22.01.26 19:25
Angela_Moore
22.01.26 19:25
Angela_Moore
Help to recover money from elon musk giveaway scam I got my money back from the Elon Musk scam. It cost me over 1 BTC and $55,000 in Dogecoin. Scammers vowed to double investments. Their sites seemed real. Fraud was tough to catch early. They hooked me with fast doubles in weeks or months. Videos showed Musk promising giveaways and gains. I bought in. I sent Bitcoin and Dogecoin in bits at first. Small sends worked. Then I wired my full savings. It vanished quick. No answers came. Bank account empty. Bills piled up. Loans covered rent and food. Sleep fled. Stress hit hard. Life crumbled. A friend spotted my trouble. He told of his scam loss last year. Same old plays. He pointed me to Sylvester Bryant, a recovery expert. Email Yt7cracker@gmail. com. WhatsApp +1 512 577 7957 or +44 7428 662701. Sylvester acted fast. He tracked blockchain trails. Dealt with exchanges. Outsmarted the scammers. In weeks, my Bitcoin came back. Even their phony profits too. Debts gone. Life back on track. Got hit? Contact him now.
-
23.01.26 07:35
Kelvin Alfons
Hello everyone. I’d like to share my personal experience from one of the most challenging times in my life. I’m based in Sydney, Australia, and on November 13, 2025, I fell victim to a fraudulent cryptocurrency investment platform that promised substantial financial growth. Believing their claims, I invested a total of $220,000 with the expectation of earning solid returns. However, when I attempted to withdraw my funds, all communication abruptly stopped. My calls were ignored, my emails went unanswered, and I was left feeling completely powerless. Like many others, I had heard that Bitcoin transactions are impossible to trace, so I assumed my money was lost forever. After some time, I discovered information about GREAT WHIP RECOVERY CYBER SERVICES, a reputable digital asset recovery firm. I decided to reach out to them, and to my astonishment, they were able to help me recover the full amount I had lost. I’m sharing my story in the hope that it may help someone else who is going through a similar situation and looking for support. Their contact is, Website: https://greatwhiprecoveryc.wixsite.com/greatwhip-site Email:[email protected] Call: +1(406)2729101
-
23.01.26 07:35
Kelvin Alfons
Hello everyone. I’d like to share my personal experience from one of the most challenging times in my life. I’m based in Sydney, Australia, and on November 13, 2025, I fell victim to a fraudulent cryptocurrency investment platform that promised substantial financial growth. Believing their claims, I invested a total of $220,000 with the expectation of earning solid returns. However, when I attempted to withdraw my funds, all communication abruptly stopped. My calls were ignored, my emails went unanswered, and I was left feeling completely powerless. Like many others, I had heard that Bitcoin transactions are impossible to trace, so I assumed my money was lost forever. After some time, I discovered information about GREAT WHIP RECOVERY CYBER SERVICES, a reputable digital asset recovery firm. I decided to reach out to them, and to my astonishment, they were able to help me recover the full amount I had lost. I’m sharing my story in the hope that it may help someone else who is going through a similar situation and looking for support. Their contact is, Website: https://greatwhiprecoveryc.wixsite.com/greatwhip-site Email:[email protected] Call: +1(406)2729101
-
26.01.26 10:36
alksnismareks
It all started when I decided to explore online trading as a way to grow my savings. Like many, I trusted what appeared to be a legitimate platform, only to find myself trapped in a nightmare. After making consistent trades and finally deciding to withdraw my profits, I was met with silence. My account was suddenly restricted—no warning, no explanation. Every attempt to contact the broker went unanswered or was met with vague, dismissive replies. For three long, agonizing months, I lived in uncertainty. I couldn’t sleep at night. I replayed every email, every transaction, wondering if I’d made a mistake. But deep down, I knew the truth: I hadn’t done anything wrong. The broker had simply decided to lock me out and keep my money. During that time, I felt completely powerless—like I was shouting into a void. The stress affected my health, my relationships, and my ability to focus on anything else. There were days I truly believed that $167,000 was gone forever, lost to the shadows of the unregulated online trading world. I even began to accept it as a painful lesson—one that would cost me dearly but might teach me to be more cautious in the future. But something inside me refused to surrender completely. That’s when I discovered TechY Force Cyber Retrieval. At first, I was cautious—after being scammed once, I didn’t want to fall victim again. But everything about TechY Force felt different. They were transparent from the start. No grand promises, no pressure tactics. Just clear, professional communication and a deep understanding of how these fraudulent brokers operate. Most importantly, they are a licensed specialist in binary options and forex fund recovery, which gave me the confidence to move forward. From our very first consultation, their team treated my case with urgency and empathy. They walked me through the entire process, explained the legal and technical avenues available, and assured me they would handle every detail. They collected documentation, analyzed transaction trails, and engaged directly with the payment processors and the broker using precise, strategic methods I never could have navigated on my own. What happened next was nothing short of miraculous. Within weeks, the broker—who had ignored me for months—began responding. And then, without any further drama or delays, my full $167,000 USD was returned to me. No deductions. No hidden fees. Just clean, complete recovery. The relief I felt was indescribable. It wasn’t just about the money—it was about reclaiming control, restoring trust, and proving that even in the face of deception, there are still good people who fight for what’s right. If you’ve been locked out of your trading account, scammed by a fake investment platform, or had your funds unjustly withheld, please know this: you are not alone, and your money may not be lost forever. Thanks to TechY Force Cyber Retrieval, I got my life back. Their expertise, integrity, and unwavering commitment turned my despair into deliverance. I cannot recommend them highly enough. To anyone reading this in distress: don’t give up. Reach out. Take that step. Because if someone like me—broken, doubtful, and nearly hopeless—can recover every dollar… so can you. WhatsApp them + 156 172 63 697 With heartfelt thanks and renewed hope, — A Recovered and Grateful Client
-
 26.01.26 23:21
robertalfred175
26.01.26 23:21
robertalfred175
CRYPTO SCAM RECOVERY SUCCESSFUL – A TESTIMONIAL OF LOST PASSWORD TO YOUR DIGITAL WALLET BACK. My name is Robert Alfred, Am from Australia. I’m sharing my experience in the hope that it helps others who have been victims of crypto scams. A few months ago, I fell victim to a fraudulent crypto investment scheme linked to a broker company. I had invested heavily during a time when Bitcoin prices were rising, thinking it was a good opportunity. Unfortunately, I was scammed out of $120,000 AUD and the broker denied me access to my digital wallet and assets. It was a devastating experience that caused many sleepless nights. Crypto scams are increasingly common and often involve fake trading platforms, phishing attacks, and misleading investment opportunities. In my desperation, a friend from the crypto community recommended Capital Crypto Recovery Service, known for helping victims recover lost or stolen funds. After doing some research and reading multiple positive reviews, I reached out to Capital Crypto Recovery. I provided all the necessary information—wallet addresses, transaction history, and communication logs. Their expert team responded immediately and began investigating. Using advanced blockchain tracking techniques, they were able to trace the stolen Dogecoin, identify the scammer’s wallet, and coordinate with relevant authorities to freeze the funds before they could be moved. Incredibly, within 24 hours, Capital Crypto Recovery successfully recovered the majority of my stolen crypto assets. I was beyond relieved and truly grateful. Their professionalism, transparency, and constant communication throughout the process gave me hope during a very difficult time. If you’ve been a victim of a crypto scam, I highly recommend them with full confidence contacting: 📧 Email: [email protected] 📱 Telegram: @Capitalcryptorecover Contact: [email protected] 📞 Call/Text: +1 (336) 390-6684 🌐 Website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
26.01.26 23:21
robertalfred175
CRYPTO SCAM RECOVERY SUCCESSFUL – A TESTIMONIAL OF LOST PASSWORD TO YOUR DIGITAL WALLET BACK. My name is Robert Alfred, Am from Australia. I’m sharing my experience in the hope that it helps others who have been victims of crypto scams. A few months ago, I fell victim to a fraudulent crypto investment scheme linked to a broker company. I had invested heavily during a time when Bitcoin prices were rising, thinking it was a good opportunity. Unfortunately, I was scammed out of $120,000 AUD and the broker denied me access to my digital wallet and assets. It was a devastating experience that caused many sleepless nights. Crypto scams are increasingly common and often involve fake trading platforms, phishing attacks, and misleading investment opportunities. In my desperation, a friend from the crypto community recommended Capital Crypto Recovery Service, known for helping victims recover lost or stolen funds. After doing some research and reading multiple positive reviews, I reached out to Capital Crypto Recovery. I provided all the necessary information—wallet addresses, transaction history, and communication logs. Their expert team responded immediately and began investigating. Using advanced blockchain tracking techniques, they were able to trace the stolen Dogecoin, identify the scammer’s wallet, and coordinate with relevant authorities to freeze the funds before they could be moved. Incredibly, within 24 hours, Capital Crypto Recovery successfully recovered the majority of my stolen crypto assets. I was beyond relieved and truly grateful. Their professionalism, transparency, and constant communication throughout the process gave me hope during a very difficult time. If you’ve been a victim of a crypto scam, I highly recommend them with full confidence contacting: 📧 Email: [email protected] 📱 Telegram: @Capitalcryptorecover Contact: [email protected] 📞 Call/Text: +1 (336) 390-6684 🌐 Website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
26.01.26 23:21
robertalfred175
CRYPTO SCAM RECOVERY SUCCESSFUL – A TESTIMONIAL OF LOST PASSWORD TO YOUR DIGITAL WALLET BACK. My name is Robert Alfred, Am from Australia. I’m sharing my experience in the hope that it helps others who have been victims of crypto scams. A few months ago, I fell victim to a fraudulent crypto investment scheme linked to a broker company. I had invested heavily during a time when Bitcoin prices were rising, thinking it was a good opportunity. Unfortunately, I was scammed out of $120,000 AUD and the broker denied me access to my digital wallet and assets. It was a devastating experience that caused many sleepless nights. Crypto scams are increasingly common and often involve fake trading platforms, phishing attacks, and misleading investment opportunities. In my desperation, a friend from the crypto community recommended Capital Crypto Recovery Service, known for helping victims recover lost or stolen funds. After doing some research and reading multiple positive reviews, I reached out to Capital Crypto Recovery. I provided all the necessary information—wallet addresses, transaction history, and communication logs. Their expert team responded immediately and began investigating. Using advanced blockchain tracking techniques, they were able to trace the stolen Dogecoin, identify the scammer’s wallet, and coordinate with relevant authorities to freeze the funds before they could be moved. Incredibly, within 24 hours, Capital Crypto Recovery successfully recovered the majority of my stolen crypto assets. I was beyond relieved and truly grateful. Their professionalism, transparency, and constant communication throughout the process gave me hope during a very difficult time. If you’ve been a victim of a crypto scam, I highly recommend them with full confidence contacting: 📧 Email: [email protected] 📱 Telegram: @Capitalcryptorecover Contact: [email protected] 📞 Call/Text: +1 (336) 390-6684 🌐 Website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
27.01.26 01:18
Kelvin Alfons
Hello everyone. I’d like to share my personal experience from one of the most challenging times in my life. I’m based in Sydney, Australia, and on November 13, 2025, I fell victim to a fraudulent cryptocurrency investment platform that promised substantial financial growth. Believing their claims, I invested a total of $220,000 with the expectation of earning solid returns. However, when I attempted to withdraw my funds, all communication abruptly stopped. My calls were ignored, my emails went unanswered, and I was left feeling completely powerless. Like many others, I had heard that Bitcoin transactions are impossible to trace, so I assumed my money was lost forever. After some time, I discovered information about GREAT WHIP RECOVERY CYBER SERVICES, a reputable digital asset recovery firm. I decided to reach out to them, and to my astonishment, they were able to help me recover the full amount I had lost. I’m sharing my story in the hope that it may help someone else who is going through a similar situation and looking for support. Their contact is, Website: https://greatwhiprecoveryc.wixsite.com/greatwhip-site Email:[email protected] Call: +1(406)2729101
-
27.01.26 01:19
Kelvin Alfons
Hello everyone. I’d like to share my personal experience from one of the most challenging times in my life. I’m based in Sydney, Australia, and on November 13, 2025, I fell victim to a fraudulent cryptocurrency investment platform that promised substantial financial growth. Believing their claims, I invested a total of $220,000 with the expectation of earning solid returns. However, when I attempted to withdraw my funds, all communication abruptly stopped. My calls were ignored, my emails went unanswered, and I was left feeling completely powerless. Like many others, I had heard that Bitcoin transactions are impossible to trace, so I assumed my money was lost forever. After some time, I discovered information about GREAT WHIP RECOVERY CYBER SERVICES, a reputable digital asset recovery firm. I decided to reach out to them, and to my astonishment, they were able to help me recover the full amount I had lost. I’m sharing my story in the hope that it may help someone else who is going through a similar situation and looking for support. Their contact is, Website: https://greatwhiprecoveryc.wixsite.com/greatwhip-site Email:[email protected] Call: +1(406)2729101
-
27.01.26 09:29
robertalfred175
CRYPTO SCAM RECOVERY SUCCESSFUL – A TESTIMONIAL OF LOST PASSWORD TO YOUR DIGITAL WALLET BACK. My name is Robert Alfred, Am from Australia. I’m sharing my experience in the hope that it helps others who have been victims of crypto scams. A few months ago, I fell victim to a fraudulent crypto investment scheme linked to a broker company. I had invested heavily during a time when Bitcoin prices were rising, thinking it was a good opportunity. Unfortunately, I was scammed out of $120,000 AUD and the broker denied me access to my digital wallet and assets. It was a devastating experience that caused many sleepless nights. Crypto scams are increasingly common and often involve fake trading platforms, phishing attacks, and misleading investment opportunities. In my desperation, a friend from the crypto community recommended Capital Crypto Recovery Service, known for helping victims recover lost or stolen funds. After doing some research and reading multiple positive reviews, I reached out to Capital Crypto Recovery. I provided all the necessary information—wallet addresses, transaction history, and communication logs. Their expert team responded immediately and began investigating. Using advanced blockchain tracking techniques, they were able to trace the stolen Dogecoin, identify the scammer’s wallet, and coordinate with relevant authorities to freeze the funds before they could be moved. Incredibly, within 24 hours, Capital Crypto Recovery successfully recovered the majority of my stolen crypto assets. I was beyond relieved and truly grateful. Their professionalism, transparency, and constant communication throughout the process gave me hope during a very difficult time. If you’ve been a victim of a crypto scam, I highly recommend them with full confidence contacting: 📧 Email: [email protected] 📱 Telegram: @Capitalcryptorecover Contact: [email protected] 📞 Call/Text: +1 (336) 390-6684 🌐 Website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
27.01.26 09:29
robertalfred175
CRYPTO SCAM RECOVERY SUCCESSFUL – A TESTIMONIAL OF LOST PASSWORD TO YOUR DIGITAL WALLET BACK. My name is Robert Alfred, Am from Australia. I’m sharing my experience in the hope that it helps others who have been victims of crypto scams. A few months ago, I fell victim to a fraudulent crypto investment scheme linked to a broker company. I had invested heavily during a time when Bitcoin prices were rising, thinking it was a good opportunity. Unfortunately, I was scammed out of $120,000 AUD and the broker denied me access to my digital wallet and assets. It was a devastating experience that caused many sleepless nights. Crypto scams are increasingly common and often involve fake trading platforms, phishing attacks, and misleading investment opportunities. In my desperation, a friend from the crypto community recommended Capital Crypto Recovery Service, known for helping victims recover lost or stolen funds. After doing some research and reading multiple positive reviews, I reached out to Capital Crypto Recovery. I provided all the necessary information—wallet addresses, transaction history, and communication logs. Their expert team responded immediately and began investigating. Using advanced blockchain tracking techniques, they were able to trace the stolen Dogecoin, identify the scammer’s wallet, and coordinate with relevant authorities to freeze the funds before they could be moved. Incredibly, within 24 hours, Capital Crypto Recovery successfully recovered the majority of my stolen crypto assets. I was beyond relieved and truly grateful. Their professionalism, transparency, and constant communication throughout the process gave me hope during a very difficult time. If you’ve been a victim of a crypto scam, I highly recommend them with full confidence contacting: 📧 Email: [email protected] 📱 Telegram: @Capitalcryptorecover Contact: [email protected] 📞 Call/Text: +1 (336) 390-6684 🌐 Website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
27.01.26 09:32
robertalfred175
CRYPTO SCAM RECOVERY SUCCESSFUL – A TESTIMONIAL OF LOST PASSWORD TO YOUR DIGITAL WALLET BACK. My name is Robert Alfred, Am from Australia. I’m sharing my experience in the hope that it helps others who have been victims of crypto scams. A few months ago, I fell victim to a fraudulent crypto investment scheme linked to a broker company. I had invested heavily during a time when Bitcoin prices were rising, thinking it was a good opportunity. Unfortunately, I was scammed out of $120,000 AUD and the broker denied me access to my digital wallet and assets. It was a devastating experience that caused many sleepless nights. Crypto scams are increasingly common and often involve fake trading platforms, phishing attacks, and misleading investment opportunities. In my desperation, a friend from the crypto community recommended Capital Crypto Recovery Service, known for helping victims recover lost or stolen funds. After doing some research and reading multiple positive reviews, I reached out to Capital Crypto Recovery. I provided all the necessary information—wallet addresses, transaction history, and communication logs. Their expert team responded immediately and began investigating. Using advanced blockchain tracking techniques, they were able to trace the stolen Dogecoin, identify the scammer’s wallet, and coordinate with relevant authorities to freeze the funds before they could be moved. Incredibly, within 24 hours, Capital Crypto Recovery successfully recovered the majority of my stolen crypto assets. I was beyond relieved and truly grateful. Their professionalism, transparency, and constant communication throughout the process gave me hope during a very difficult time. If you’ve been a victim of a crypto scam, I highly recommend them with full confidence contacting: 📧 Email: [email protected] 📱 Telegram: @Capitalcryptorecover Contact: [email protected] 📞 Call/Text: +1 (336) 390-6684 🌐 Website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
 29.01.26 05:03
joyo
29.01.26 05:03
joyo
The digital world of cryptocurrency offers big chances, but it also hides tricky scams. Losing your crypto to fraud feels awful. It can leave you feeling lost and violated. This guide tells you what to do right away if a crypto scam has hit you. These steps can help you get funds back or stop more trouble. Knowing what to do fast can change everything,reach marie ([email protected] and whatsapp:+1 7127594675)
-
30.01.26 08:23
joseph67t
It's a joy to write this review. Since I began working with Marie at the beginning of 2018, the service has been outstanding. Hackers stole my monies, and I was frightened about how I would get them back. I didn't know where to begin, consequently it was a nightmare for me. But once my friend told me about ([email protected] and whatsap:+1 7127594675), things became simple for me. I'm glad she was able to get my bitcoin back so I could start trading on Binance again!
-
 31.01.26 00:55
harristhomas7376
31.01.26 00:55
harristhomas7376
"In the crypto world, this is great news I want to share. Last year, I fell victim to a scam disguised as a safe investment option. I have invested in crypto trading platforms for about 10yrs thinking I was ensuring myself a retirement income, only to find that all my assets were either frozen, I believed my assets were secure — until I discovered that my BTC funds had been frozen and withdrawals were impossible. It was a devastating moment when I realized I had been scammed, and I thought my Bitcoin was gone forever, Everything changed when a close friend recommended the Capital Crypto Recover Service. Their professionalism, expertise, and dedication enabled me to recover my lost Bitcoin funds back — more than €560.000 DEM to my BTC wallet. What once felt impossible became a reality thanks to their support. If you have lost Bitcoin through scams, hacking, failed withdrawals, or similar challenges, don’t lose hope. I strongly recommend Capital Crypto Recover Service to anyone seeking a reliable and effective solution for recovering any wallet assets. They have a proven track record of successful reputation in recovering lost password assets for their clients and can help you navigate the process of recovering your funds. Don’t let scammers get away with your hard-earned money – contact Email: [email protected] Phone CALL/Text Number: +1 (336) 390-6684 Contact: [email protected] Website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
31.01.26 00:55
harristhomas7376
"In the crypto world, this is great news I want to share. Last year, I fell victim to a scam disguised as a safe investment option. I have invested in crypto trading platforms for about 10yrs thinking I was ensuring myself a retirement income, only to find that all my assets were either frozen, I believed my assets were secure — until I discovered that my BTC funds had been frozen and withdrawals were impossible. It was a devastating moment when I realized I had been scammed, and I thought my Bitcoin was gone forever, Everything changed when a close friend recommended the Capital Crypto Recover Service. Their professionalism, expertise, and dedication enabled me to recover my lost Bitcoin funds back — more than €560.000 DEM to my BTC wallet. What once felt impossible became a reality thanks to their support. If you have lost Bitcoin through scams, hacking, failed withdrawals, or similar challenges, don’t lose hope. I strongly recommend Capital Crypto Recover Service to anyone seeking a reliable and effective solution for recovering any wallet assets. They have a proven track record of successful reputation in recovering lost password assets for their clients and can help you navigate the process of recovering your funds. Don’t let scammers get away with your hard-earned money – contact Email: [email protected] Phone CALL/Text Number: +1 (336) 390-6684 Contact: [email protected] Website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
 02.02.26 18:52
Christopherbelle
02.02.26 18:52
Christopherbelle
Sylvester Bryant is a top crypto recovery agent! Then I contacted them with my story that i have been scammed. It took time, yet my stolen crypto was recovered . Need help? Reach out to Sylvester on WhatsApp at +1 512 577 7957 or +44 7428 662701. Or email yt7cracker@gmail . com.
-
03.02.26 08:05
robertalfred175
CRYPTO SCAM RECOVERY SUCCESSFUL – A TESTIMONIAL OF LOST PASSWORD TO YOUR DIGITAL WALLET BACK. My name is Robert Alfred, Am from Australia. I’m sharing my experience in the hope that it helps others who have been victims of crypto scams. A few months ago, I fell victim to a fraudulent crypto investment scheme linked to a broker company. I had invested heavily during a time when Bitcoin prices were rising, thinking it was a good opportunity. Unfortunately, I was scammed out of $120,000 AUD and the broker denied me access to my digital wallet and assets. It was a devastating experience that caused many sleepless nights. Crypto scams are increasingly common and often involve fake trading platforms, phishing attacks, and misleading investment opportunities. In my desperation, a friend from the crypto community recommended Capital Crypto Recovery Service, known for helping victims recover lost or stolen funds. After doing some research and reading multiple positive reviews, I reached out to Capital Crypto Recovery. I provided all the necessary information—wallet addresses, transaction history, and communication logs. Their expert team responded immediately and began investigating. Using advanced blockchain tracking techniques, they were able to trace the stolen Dogecoin, identify the scammer’s wallet, and coordinate with relevant authorities to freeze the funds before they could be moved. Incredibly, within 24 hours, Capital Crypto Recovery successfully recovered the majority of my stolen crypto assets. I was beyond relieved and truly grateful. Their professionalism, transparency, and constant communication throughout the process gave me hope during a very difficult time. If you’ve been a victim of a crypto scam, I highly recommend them with full confidence contacting: 📧 Email: [email protected] 📱 Telegram: @Capitalcryptorecover Contact: [email protected] 📞 Call/Text: +1 (336) 390-6684 🌐 Website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
03.02.26 08:05
robertalfred175
CRYPTO SCAM RECOVERY SUCCESSFUL – A TESTIMONIAL OF LOST PASSWORD TO YOUR DIGITAL WALLET BACK. My name is Robert Alfred, Am from Australia. I’m sharing my experience in the hope that it helps others who have been victims of crypto scams. A few months ago, I fell victim to a fraudulent crypto investment scheme linked to a broker company. I had invested heavily during a time when Bitcoin prices were rising, thinking it was a good opportunity. Unfortunately, I was scammed out of $120,000 AUD and the broker denied me access to my digital wallet and assets. It was a devastating experience that caused many sleepless nights. Crypto scams are increasingly common and often involve fake trading platforms, phishing attacks, and misleading investment opportunities. In my desperation, a friend from the crypto community recommended Capital Crypto Recovery Service, known for helping victims recover lost or stolen funds. After doing some research and reading multiple positive reviews, I reached out to Capital Crypto Recovery. I provided all the necessary information—wallet addresses, transaction history, and communication logs. Their expert team responded immediately and began investigating. Using advanced blockchain tracking techniques, they were able to trace the stolen Dogecoin, identify the scammer’s wallet, and coordinate with relevant authorities to freeze the funds before they could be moved. Incredibly, within 24 hours, Capital Crypto Recovery successfully recovered the majority of my stolen crypto assets. I was beyond relieved and truly grateful. Their professionalism, transparency, and constant communication throughout the process gave me hope during a very difficult time. If you’ve been a victim of a crypto scam, I highly recommend them with full confidence contacting: 📧 Email: [email protected] 📱 Telegram: @Capitalcryptorecover Contact: [email protected] 📞 Call/Text: +1 (336) 390-6684 🌐 Website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
 04.02.26 16:23
borutaralf
04.02.26 16:23
borutaralf
GREAT WHIP RECOVERY CYBER SERVICES TRUSTED EXPERTS IN ONLINE RECOVERY SOLUTIONS PHONE CALL:+1(406)2729101 I was unfortunately deceived and scammed out of $88,000 by someone I trusted to manage my funds during a transaction we carried out together. The experience left me deeply disappointed and hurt, realizing that someone could betray that level of trust without any remorse. Determined to seek justice and recover what was stolen, I began searching for legal assistance and came across numerous testimonials about GREAT WHIP RECOVERY CYBER SERVICES, a group known for helping victims recover lost funds. From what I learned, they have successfully assisted many people facing similar situations, returning stolen funds to their rightful owners in a remarkably short time. In my case, the GREAT WHIP RECOVERY CYBER SERVICES were able to recover my funds within just 48 hours, which was truly unbelievable. Even more reassuring was the fact that the scammer was identified, located, and eventually arrested by local authorities in his region. That outcome brought a great sense of relief and closure. I hope this information helps others who have lost their hard-earned money due to misplaced trust. If you’re in a similar situation, you can contact them through their info below to seek help in recovering your stolen funds. Email: [email protected] Website https://greatwhiprecoveryc.wixsite.com/greatwhip-site Phone Call:+1(406)2729101
-
04.02.26 16:24
borutaralf
GREAT WHIP RECOVERY CYBER SERVICES TRUSTED EXPERTS IN ONLINE RECOVERY SOLUTIONS PHONE CALL:+1(406)2729101 I was unfortunately deceived and scammed out of $88,000 by someone I trusted to manage my funds during a transaction we carried out together. The experience left me deeply disappointed and hurt, realizing that someone could betray that level of trust without any remorse. Determined to seek justice and recover what was stolen, I began searching for legal assistance and came across numerous testimonials about GREAT WHIP RECOVERY CYBER SERVICES, a group known for helping victims recover lost funds. From what I learned, they have successfully assisted many people facing similar situations, returning stolen funds to their rightful owners in a remarkably short time. In my case, the GREAT WHIP RECOVERY CYBER SERVICES were able to recover my funds within just 48 hours, which was truly unbelievable. Even more reassuring was the fact that the scammer was identified, located, and eventually arrested by local authorities in his region. That outcome brought a great sense of relief and closure. I hope this information helps others who have lost their hard-earned money due to misplaced trust. If you’re in a similar situation, you can contact them through their info below to seek help in recovering your stolen funds. Email: [email protected] Website https://greatwhiprecoveryc.wixsite.com/greatwhip-site Phone Call:+1(406)2729101
-
 04.02.26 17:11
wendytaylor015
04.02.26 17:11
wendytaylor015
My name is Wendy Taylor, I'm from Los Angeles, i want to announce to you Viewer how Capital Crypto Recover help me to restore my Lost Bitcoin, I invested with a Crypto broker without proper research to know what I was hoarding my hard-earned money into scammers, i lost access to my crypto wallet or had your funds stolen? Don’t worry Capital Crypto Recover is here to help you recover your cryptocurrency with cutting-edge technical expertise, With years of experience in the crypto world, Capital Crypto Recover employs the best latest tools and ethical hacking techniques to help you recover lost assets, unlock hacked accounts, Whether it’s a forgotten password, Capital Crypto Recover has the expertise to help you get your crypto back. a security company service that has a 100% success rate in the recovery of crypto assets, i lost wallet and hacked accounts. I provided them the information they requested and they began their investigation. To my surprise, Capital Crypto Recover was able to trace and recover my crypto assets successfully within 24hours. Thank you for your service in helping me recover my $647,734 worth of crypto funds and I highly recommend their recovery services, they are reliable and a trusted company to any individuals looking to recover lost money. Contact email [email protected] OR Telegram @Capitalcryptorecover Call/Text Number +1 (336)390-6684 his contact: [email protected] His website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
05.02.26 12:07
Thomas Muller
YOU CAN REACH OUT TO GREAT WHIP RECOVERY CYBER SERVICES FOR HELP TO RECOVER YOUR STOLEN BTC OR ETH BACK CALL:+1(406)2729101 I once fell victim to online investment scheme that cost me a devastating €254,000. I’m Thomas Muller from Berlin, Germany. The person I trusted turned out to be a fraud, and the moment I realized I’d been deceived, my entire world stopped. I immediately began searching for legitimate ways to recover my funds and hold the scammer accountable. During my search, I came across several testimonies of how Great Whip Recovery Cyber Services helped some people recover money they lost to cyber fraud, I contacted Great Whip Recovery Cyber Service team and provided all the evidence I had. Within about 36 hours, the experts traced the digital trail left by the fraudster, the individual was eventually tracked down and I recovered all my money back. You can contact them with, website https://greatwhiprecoveryc.wixsite.com/greatwhip-site text +1(406)2729101 email [email protected]
-
 05.02.26 15:46
feliciabotezatu
05.02.26 15:46
feliciabotezatu
Losing access to your cryptocurrency can be devastating—whether you’ve been scammed, hacked, or locked out due to a forgotten password. Many assume their digital assets are gone forever. But with the right expertise, recovery is not only possible—it’s our daily reality. At TECHY FORCE CYBER RETRIEVAL (TFCR), we’re a globally recognized, fully legitimate crypto recovery service dedicated to helping victims reclaim lost or stolen digital assets—safely, ethically, and effectively. Who We Are Backed by a team of certified blockchain forensic analysts, cybersecurity specialists, and ethical hackers, TFCR has recovered millions of dollars in Bitcoin, Ethereum, USDT, and other major cryptocurrencies for clients worldwide. We specialize in cases involving: - Investment scams and fake platforms - Wallet hacks and unauthorized transactions - Forgotten passwords, seed phrases, or corrupted backups - Inaccessible hardware or software wallets Our mission is clear: Help you recover what’s rightfully yours—with honesty, transparency, and proven results. How We Work 1. Confidential Case Review Share your situation with us—no cost, no obligation. We assess whether your case is recoverable based on transaction data, wallet details, and loss type. 2. Advanced Blockchain Forensics Using industry-leading tools, we trace your funds across blockchains, identify destination addresses, and determine if assets are held on exchanges or recoverable platforms—even after complex laundering attempts. 3. Custom Recovery Execution Depending on your case, we: - Reconstruct access to locked wallets using secure decryption methods - Engage with exchanges or payment processors to freeze or retrieve funds - Provide forensic reports to support legal or compliance actions - Negotiate with third parties when appropriate and safe 4. Secure Return & Prevention Advice Recovered assets go directly to a wallet you control. We also offer practical guidance to help you avoid future losses—because security starts after recovery. Why Choose TFCR? No Recovery, No Fee – You only pay upon successful retrieval Legitimate & Transparent – No upfront payments, no hidden costs Global Expertise – Proven success across 50+ countries Ethical Standards – All actions comply with cybersecurity and privacy best practices While crypto threats grow daily, so does our resolve. At TECHY FORCE CYBER RETRIEVAL, we don’t just track transactions—we restore trust, hope, and financial peace of mind. Don’t give up on your crypto. Act now—before critical evidence disappears. 📧 Email: [email protected] 🌐 Visit: Official https://techyforcecyberretrieval.com Website] 🕒 Available 24/7 for urgent cases Your crypto may be missing—but with TFCR, it’s never truly lost. ©️ 2026 TECHY FORCE CYBER RETRIEVAL — Trusted. Professional. Results-Driven.
-
05.02.26 15:52
harryjones5
How Can I Contact a Cryptocurrency Recovery Company? Visit iFORCE HACKER RECOVERY I realize how volatile and thrilling cryptocurrency can be. After joining a Telegram-based service, I made consistent profits for six months before unexpected faults deprived me of approximately $343,000. Withdrawal blunders, little help, and rising dread kept me stuck. I then discovered iForce Hacker Recovery from positive reviews. They replied swiftly, handled my issue professionally, and walked me through every step. My valuables were returned within a week, giving me back my confidence. I heartily recommend their dependable, professional aid services. Contact Info: Website address: htt p:// iforcehackers. co m. Email: iforcehk @ consultant .co m WhatsApp: +1 240 803-3706
-
06.02.26 14:44
feliciabotezatu
Losing access to your cryptocurrency can be devastating—whether you’ve been scammed, hacked, or locked out due to a forgotten password. Many assume their digital assets are gone forever. But with the right expertise, recovery is not only possible—it’s our daily reality. At TECHY FORCE CYBER RETRIEVAL (TFCR), we’re a globally recognized, fully legitimate crypto recovery service dedicated to helping victims reclaim lost or stolen digital assets—safely, ethically, and effectively. Who We Are Backed by a team of certified blockchain forensic analysts, cybersecurity specialists, and ethical hackers, TFCR has recovered millions of dollars in Bitcoin, Ethereum, USDT, and other major cryptocurrencies for clients worldwide. We specialize in cases involving: - Investment scams and fake platforms - Wallet hacks and unauthorized transactions - Forgotten passwords, seed phrases, or corrupted backups - Inaccessible hardware or software wallets Our mission is clear: Help you recover what’s rightfully yours—with honesty, transparency, and proven results. How We Work 1. Confidential Case Review Share your situation with us—no cost, no obligation. We assess whether your case is recoverable based on transaction data, wallet details, and loss type. 2. Advanced Blockchain Forensics Using industry-leading tools, we trace your funds across blockchains, identify destination addresses, and determine if assets are held on exchanges or recoverable platforms—even after complex laundering attempts. 3. Custom Recovery Execution Depending on your case, we: - Reconstruct access to locked wallets using secure decryption methods - Engage with exchanges or payment processors to freeze or retrieve funds - Provide forensic reports to support legal or compliance actions - Negotiate with third parties when appropriate and safe 4. Secure Return & Prevention Advice Recovered assets go directly to a wallet you control. We also offer practical guidance to help you avoid future losses—because security starts after recovery. Why Choose TFCR? No Recovery, No Fee – You only pay upon successful retrieval Legitimate & Transparent – No upfront payments, no hidden costs Global Expertise – Proven success across 50+ countries Ethical Standards – All actions comply with cybersecurity and privacy best practices While crypto threats grow daily, so does our resolve. At TECHY FORCE CYBER RETRIEVAL, we don’t just track transactions—we restore trust, hope, and financial peace of mind. Don’t give up on your crypto. Act now—before critical evidence disappears. Email: [email protected] Visit: Official https://techyforcecyberretrieval.com Website] Available 24/7 for urgent cases Your crypto may be missing—but with TFCR, it’s never truly lost. ©️ 2026 TECHY FORCE CYBER RETRIEVAL — Trusted. Professional. Results-Driven.
-
 07.02.26 00:44
marcushenderson624
07.02.26 00:44
marcushenderson624
Bitcoin Recovery Testimonial After falling victim to a cryptocurrency scam group, I lost $354,000 worth of USDT. I thought all hope was lost from the experience of losing my hard-earned money to scammers. I was devastated and believed there was no way to recover my funds. Fortunately, I started searching for help to recover my stolen funds and I came across a lot of testimonials online about Capital Crypto Recovery, an agent who helps in recovery of lost bitcoin funds, I contacted Capital Crypto Recover Service, and with their expertise, they successfully traced and recovered my stolen assets. Their team was professional, kept me updated throughout the process, and demonstrated a deep understanding of blockchain transactions and recovery protocols. They are trusted and very reliable with a 100% successful rate record Recovery bitcoin, I’m grateful for their help and highly recommend their services to anyone seeking assistance with lost crypto. Contact: [email protected] Phone CALL/Text Number: +1 (336) 390-6684 Email: [email protected] Website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
07.02.26 00:44
marcushenderson624
Bitcoin Recovery Testimonial After falling victim to a cryptocurrency scam group, I lost $354,000 worth of USDT. I thought all hope was lost from the experience of losing my hard-earned money to scammers. I was devastated and believed there was no way to recover my funds. Fortunately, I started searching for help to recover my stolen funds and I came across a lot of testimonials online about Capital Crypto Recovery, an agent who helps in recovery of lost bitcoin funds, I contacted Capital Crypto Recover Service, and with their expertise, they successfully traced and recovered my stolen assets. Their team was professional, kept me updated throughout the process, and demonstrated a deep understanding of blockchain transactions and recovery protocols. They are trusted and very reliable with a 100% successful rate record Recovery bitcoin, I’m grateful for their help and highly recommend their services to anyone seeking assistance with lost crypto. Contact: [email protected] Phone CALL/Text Number: +1 (336) 390-6684 Email: [email protected] Website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
07.02.26 04:43
Matt Kegan
Reach out to SolidBlock Forensics if you want to get back your coins from fake crypto investment or your wallet was compromised and all your coins gone. SolidBlock Forensics provide deep ethical analysis and investigation that enables them to trace these schemes, and recover all your funds. Their services are professional and reliable. http://www.solidblockforensics.com
-
07.02.26 17:31
robertalfred175
CRYPTO SCAM RECOVERY SUCCESSFUL – A TESTIMONIAL OF LOST PASSWORD TO YOUR DIGITAL WALLET BACK. My name is Robert Alfred, Am from Australia. I’m sharing my experience in the hope that it helps others who have been victims of crypto scams. A few months ago, I fell victim to a fraudulent crypto investment scheme linked to a broker company. I had invested heavily during a time when Bitcoin prices were rising, thinking it was a good opportunity. Unfortunately, I was scammed out of $120,000 AUD and the broker denied me access to my digital wallet and assets. It was a devastating experience that caused many sleepless nights. Crypto scams are increasingly common and often involve fake trading platforms, phishing attacks, and misleading investment opportunities. In my desperation, a friend from the crypto community recommended Capital Crypto Recovery Service, known for helping victims recover lost or stolen funds. After doing some research and reading multiple positive reviews, I reached out to Capital Crypto Recovery. I provided all the necessary information—wallet addresses, transaction history, and communication logs. Their expert team responded immediately and began investigating. Using advanced blockchain tracking techniques, they were able to trace the stolen Dogecoin, identify the scammer’s wallet, and coordinate with relevant authorities to freeze the funds before they could be moved. Incredibly, within 24 hours, Capital Crypto Recovery successfully recovered the majority of my stolen crypto assets. I was beyond relieved and truly grateful. Their professionalism, transparency, and constant communication throughout the process gave me hope during a very difficult time. If you’ve been a victim of a crypto scam, I highly recommend them with full confidence contacting: 📧 Email: [email protected] 📱 Telegram: @Capitalcryptorecover Contact: [email protected] 📞 Call/Text: +1 (336) 390-6684 🌐 Website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
10.02.26 23:52
frankqq
It is a pleasure to write this review. Since I began working with Marie in early 2018, the service has been outstanding. My coins were stolen by hackers, and I was afraid I wouldn't be able to recover them. It was a nightmare for me because I didn't know where to start. But after my friend told me about [email protected] and whatsapp:+1 7127594675, things became simple for me. I'm glad she was able to get my bitcoin back so I could start trading again.
-
 11.02.26 05:50
patricialovick86
11.02.26 05:50
patricialovick86
How To Recover Your Bitcoin Without Falling Victim To Scams: A Testimony Experience With Capital Crypto Recover Services, Contact Telegram: @Capitalcryptorecover Dear Everyone, I would like to take a moment to share my positive experience with Capital Crypto Recover Services. Initially, I was unsure if it would be possible to recover my stolen bitcoins. However, with their expertise and professionalism, I was able to fully recover my funds. Unfortunately, many individuals fall victim to scams in the cryptocurrency space, especially those involving fraudulent investment platforms. However, I advise caution, as not all recovery services are legitimate. I personally lost $273,000 worth of Bitcoin from my Binance account due to a deceptive platform. If you have suffered a similar loss, you may be considering crypto recovery, The Capital Crypto Recover is the most knowledgeable and effective Capital Crypto Recovery Services assisted me in recovering my stolen funds within 24 hours, after getting access to my wallet. Their service was not only prompt but also highly professional and effective, and many recovery services may not be trustworthy. Therefore, I highly recommend Capital Crypto Recover to you. i do always research and see reviews about their service, For assistance finding your misplaced cryptocurrency, get in touch with them, They do their jobs quickly and excellently, Stay safe and vigilant in the crypto world. Contact: [email protected] You can reach them via email at [email protected] OR Call/Text Number +1 (336)390-6684 his contact website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
11.02.26 05:50
patricialovick86
How To Recover Your Bitcoin Without Falling Victim To Scams: A Testimony Experience With Capital Crypto Recover Services, Contact Telegram: @Capitalcryptorecover Dear Everyone, I would like to take a moment to share my positive experience with Capital Crypto Recover Services. Initially, I was unsure if it would be possible to recover my stolen bitcoins. However, with their expertise and professionalism, I was able to fully recover my funds. Unfortunately, many individuals fall victim to scams in the cryptocurrency space, especially those involving fraudulent investment platforms. However, I advise caution, as not all recovery services are legitimate. I personally lost $273,000 worth of Bitcoin from my Binance account due to a deceptive platform. If you have suffered a similar loss, you may be considering crypto recovery, The Capital Crypto Recover is the most knowledgeable and effective Capital Crypto Recovery Services assisted me in recovering my stolen funds within 24 hours, after getting access to my wallet. Their service was not only prompt but also highly professional and effective, and many recovery services may not be trustworthy. Therefore, I highly recommend Capital Crypto Recover to you. i do always research and see reviews about their service, For assistance finding your misplaced cryptocurrency, get in touch with them, They do their jobs quickly and excellently, Stay safe and vigilant in the crypto world. Contact: [email protected] You can reach them via email at [email protected] OR Call/Text Number +1 (336)390-6684 his contact website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
12.02.26 23:55
brouwerspatrick8
I’ve always believed that sustainability begins at home—not just in how we recycle or conserve energy, but in the very structures we live in. For years, I dreamed of building a zero-waste neighborhood where every house functions like a living ecosystem: solar-powered, water-wise, and crowned with rooftop greenhouses that feed families and filter air. It wasn’t just architecture—it was my vision for a quieter, cleaner future. To make it real, I turned to Bitcoin. Not as a speculative bet, but as a long-term store of value aligned with my values—decentralized, transparent, and independent of broken systems. Over seven years, I poured savings, side income, and relentless discipline into building a $680,000 crypto portfolio. Every coin had a purpose: permits, materials, and community partnerships. My dream had a balance sheet. Then, in one exhausted, distracted moment, it all collapsed. It was November 2025. I was juggling contractor delays, city inspections, and endless design revisions. My nerves were frayed, my coffee pot never empty. When a “Ledger Live Update” notification popped up, I didn’t think twice. The interface looked identical—same logo, same layout. I entered my credentials… and within seconds, the app disappeared. My wallet balance dropped to zero. I sat frozen. My stomach dropped. All that work—years of sacrifice—gone in a blink. The days that followed were dark. I scoured forums, filed reports, and replayed my mistake on loop. Guilt ate at me. How could I have been so careless? My greenhouse renderings sat untouched. My dream felt like a cruel joke. Just when I was ready to walk away, I stumbled upon a newsletter about green innovation. Tucked between articles on carbon-neutral cities and next-gen solar panels was a short feature on *Digital Light Solution*—a specialized team that helps victims of crypto theft recover stolen assets. Skeptical but desperate, I reached out. What followed wasn’t magic—but it was close to it. Their team treated my case with urgency and compassion. They traced the transaction trail, identified the laundering path, and worked with exchanges to freeze what they could. Within weeks, they’d recovered a significant portion of my funds—enough to restart. Today, I’m not just rebuilding my portfolio—I’m breaking ground on my prototype greenhouse. And every beam, every pane of glass, carries the lesson I learned: that even in our most vulnerable moments, there’s still light to be found. [email protected] Telegram ——digitallightsolution website https://digitallightsolution.com/ WHAT'S APP https://wa.link/989vlf
-
12.02.26 23:56
brouwerspatrick8
I’ve always believed that sustainability begins at home—not just in how we recycle or conserve energy, but in the very structures we live in. For years, I dreamed of building a zero-waste neighborhood where every house functions like a living ecosystem: solar-powered, water-wise, and crowned with rooftop greenhouses that feed families and filter air. It wasn’t just architecture—it was my vision for a quieter, cleaner future. To make it real, I turned to Bitcoin. Not as a speculative bet, but as a long-term store of value aligned with my values—decentralized, transparent, and independent of broken systems. Over seven years, I poured savings, side income, and relentless discipline into building a $680,000 crypto portfolio. Every coin had a purpose: permits, materials, and community partnerships. My dream had a balance sheet. Then, in one exhausted, distracted moment, it all collapsed. It was November 2025. I was juggling contractor delays, city inspections, and endless design revisions. My nerves were frayed, my coffee pot never empty. When a “Ledger Live Update” notification popped up, I didn’t think twice. The interface looked identical—same logo, same layout. I entered my credentials… and within seconds, the app disappeared. My wallet balance dropped to zero. I sat frozen. My stomach dropped. All that work—years of sacrifice—gone in a blink. The days that followed were dark. I scoured forums, filed reports, and replayed my mistake on loop. Guilt ate at me. How could I have been so careless? My greenhouse renderings sat untouched. My dream felt like a cruel joke. Just when I was ready to walk away, I stumbled upon a newsletter about green innovation. Tucked between articles on carbon-neutral cities and next-gen solar panels was a short feature on *Digital Light Solution*—a specialized team that helps victims of crypto theft recover stolen assets. Skeptical but desperate, I reached out. What followed wasn’t magic—but it was close to it. Their team treated my case with urgency and compassion. They traced the transaction trail, identified the laundering path, and worked with exchanges to freeze what they could. Within weeks, they’d recovered a significant portion of my funds—enough to restart. Today, I’m not just rebuilding my portfolio—I’m breaking ground on my prototype greenhouse. And every beam, every pane of glass, carries the lesson I learned: that even in our most vulnerable moments, there’s still light to be found. [email protected] Telegram ——digitallightsolution website https://digitallightsolution.com/ WHAT'S APP https://wa.link/989vlf
-
13.02.26 00:17
marcushenderson624
Bitcoin Recovery Testimonial After falling victim to a cryptocurrency scam group, I lost $354,000 worth of USDT. I thought all hope was lost from the experience of losing my hard-earned money to scammers. I was devastated and believed there was no way to recover my funds. Fortunately, I started searching for help to recover my stolen funds and I came across a lot of testimonials online about Capital Crypto Recovery, an agent who helps in recovery of lost bitcoin funds, I contacted Capital Crypto Recover Service, and with their expertise, they successfully traced and recovered my stolen assets. Their team was professional, kept me updated throughout the process, and demonstrated a deep understanding of blockchain transactions and recovery protocols. They are trusted and very reliable with a 100% successful rate record Recovery bitcoin, I’m grateful for their help and highly recommend their services to anyone seeking assistance with lost crypto. Contact: [email protected] Phone CALL/Text Number: +1 (336) 390-6684 Email: [email protected] Website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
13.02.26 00:17
marcushenderson624
Bitcoin Recovery Testimonial After falling victim to a cryptocurrency scam group, I lost $354,000 worth of USDT. I thought all hope was lost from the experience of losing my hard-earned money to scammers. I was devastated and believed there was no way to recover my funds. Fortunately, I started searching for help to recover my stolen funds and I came across a lot of testimonials online about Capital Crypto Recovery, an agent who helps in recovery of lost bitcoin funds, I contacted Capital Crypto Recover Service, and with their expertise, they successfully traced and recovered my stolen assets. Their team was professional, kept me updated throughout the process, and demonstrated a deep understanding of blockchain transactions and recovery protocols. They are trusted and very reliable with a 100% successful rate record Recovery bitcoin, I’m grateful for their help and highly recommend their services to anyone seeking assistance with lost crypto. Contact: [email protected] Phone CALL/Text Number: +1 (336) 390-6684 Email: [email protected] Website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
13.02.26 02:16
Ralf Boruta
GREAT WHIP RECOVERY CYBER SERVICES TRUSTED EXPERTS IN ONLINE RECOVERY SOLUTIONS PHONE CALL:+1(406)2729101 I was unfortunately deceived and scammed out of $88,000 by someone I trusted to manage my funds during a transaction we carried out together. The experience left me deeply disappointed and hurt, realizing that someone could betray that level of trust without any remorse. Determined to seek justice and recover what was stolen, I began searching for legal assistance and came across numerous testimonials about GREAT WHIP RECOVERY CYBER SERVICES, a group known for helping victims recover lost funds. From what I learned, they have successfully assisted many people facing similar situations, returning stolen funds to their rightful owners in a remarkably short time. In my case, the GREAT WHIP RECOVERY CYBER SERVICES were able to recover my funds within just 48 hours, which was truly unbelievable. Even more reassuring was the fact that the scammer was identified, located, and eventually arrested by local authorities in his region. That outcome brought a great sense of relief and closure. I hope this information helps others who have lost their hard-earned money due to misplaced trust. If you’re in a similar situation, you can contact them through their info below to seek help in recovering your stolen funds. Email: [email protected] Website https://greatwhiprecoveryc.wixsite.com/greatwhip-site Phone Call:+1(406)2729101
-
13.02.26 02:16
Ralf Boruta
GREAT WHIP RECOVERY CYBER SERVICES TRUSTED EXPERTS IN ONLINE RECOVERY SOLUTIONS PHONE CALL:+1(406)2729101 I was unfortunately deceived and scammed out of $88,000 by someone I trusted to manage my funds during a transaction we carried out together. The experience left me deeply disappointed and hurt, realizing that someone could betray that level of trust without any remorse. Determined to seek justice and recover what was stolen, I began searching for legal assistance and came across numerous testimonials about GREAT WHIP RECOVERY CYBER SERVICES, a group known for helping victims recover lost funds. From what I learned, they have successfully assisted many people facing similar situations, returning stolen funds to their rightful owners in a remarkably short time. In my case, the GREAT WHIP RECOVERY CYBER SERVICES were able to recover my funds within just 48 hours, which was truly unbelievable. Even more reassuring was the fact that the scammer was identified, located, and eventually arrested by local authorities in his region. That outcome brought a great sense of relief and closure. I hope this information helps others who have lost their hard-earned money due to misplaced trust. If you’re in a similar situation, you can contact them through their info below to seek help in recovering your stolen funds. Email: [email protected] Website https://greatwhiprecoveryc.wixsite.com/greatwhip-site Phone Call:+1(406)2729101
-
13.02.26 18:29
robertalfred175
CRYPTO SCAM RECOVERY SUCCESSFUL – A TESTIMONIAL OF LOST PASSWORD TO YOUR DIGITAL WALLET BACK. My name is Robert Alfred, Am from Australia. I’m sharing my experience in the hope that it helps others who have been victims of crypto scams. A few months ago, I fell victim to a fraudulent crypto investment scheme linked to a broker company. I had invested heavily during a time when Bitcoin prices were rising, thinking it was a good opportunity. Unfortunately, I was scammed out of $120,000 AUD and the broker denied me access to my digital wallet and assets. It was a devastating experience that caused many sleepless nights. Crypto scams are increasingly common and often involve fake trading platforms, phishing attacks, and misleading investment opportunities. In my desperation, a friend from the crypto community recommended Capital Crypto Recovery Service, known for helping victims recover lost or stolen funds. After doing some research and reading multiple positive reviews, I reached out to Capital Crypto Recovery. I provided all the necessary information—wallet addresses, transaction history, and communication logs. Their expert team responded immediately and began investigating. Using advanced blockchain tracking techniques, they were able to trace the stolen Dogecoin, identify the scammer’s wallet, and coordinate with relevant authorities to freeze the funds before they could be moved. Incredibly, within 24 hours, Capital Crypto Recovery successfully recovered the majority of my stolen crypto assets. I was beyond relieved and truly grateful. Their professionalism, transparency, and constant communication throughout the process gave me hope during a very difficult time. If you’ve been a victim of a crypto scam, I highly recommend them with full confidence contacting: 📧 Email: [email protected] 📱 Telegram: @Capitalcryptorecover Contact: [email protected] 📞 Call/Text: +1 (336) 390-6684 🌐 Website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
13.02.26 18:29
robertalfred175
CRYPTO SCAM RECOVERY SUCCESSFUL – A TESTIMONIAL OF LOST PASSWORD TO YOUR DIGITAL WALLET BACK. My name is Robert Alfred, Am from Australia. I’m sharing my experience in the hope that it helps others who have been victims of crypto scams. A few months ago, I fell victim to a fraudulent crypto investment scheme linked to a broker company. I had invested heavily during a time when Bitcoin prices were rising, thinking it was a good opportunity. Unfortunately, I was scammed out of $120,000 AUD and the broker denied me access to my digital wallet and assets. It was a devastating experience that caused many sleepless nights. Crypto scams are increasingly common and often involve fake trading platforms, phishing attacks, and misleading investment opportunities. In my desperation, a friend from the crypto community recommended Capital Crypto Recovery Service, known for helping victims recover lost or stolen funds. After doing some research and reading multiple positive reviews, I reached out to Capital Crypto Recovery. I provided all the necessary information—wallet addresses, transaction history, and communication logs. Their expert team responded immediately and began investigating. Using advanced blockchain tracking techniques, they were able to trace the stolen Dogecoin, identify the scammer’s wallet, and coordinate with relevant authorities to freeze the funds before they could be moved. Incredibly, within 24 hours, Capital Crypto Recovery successfully recovered the majority of my stolen crypto assets. I was beyond relieved and truly grateful. Their professionalism, transparency, and constant communication throughout the process gave me hope during a very difficult time. If you’ve been a victim of a crypto scam, I highly recommend them with full confidence contacting: 📧 Email: [email protected] 📱 Telegram: @Capitalcryptorecover Contact: [email protected] 📞 Call/Text: +1 (336) 390-6684 🌐 Website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
 17.02.26 23:59
Lilyfox
17.02.26 23:59
Lilyfox
These group of CYBER GURUS below helped my family in recovering stolen bitcoin by scammers and they also helped me in securing a university title in one of the best university in the world I'm saying a very big thank you to them contact them now ; [email protected] or WhatsApp +447476606228 -Recovery of funds from fake platform/BINARY TRADING - Retrieval of fraudulent funds - Bank Transfer service - BITCOIN TOP UP - Money, recovery from any country in the world - Change of university degrees - Spying of all social media account within - Sales of Blank ATM and Credit Cards - Sales of university Titles originals. - Clearing of bank debts - University title offer and so many others ... Despite all odds these internet gurus have proven themselves worthy to be called a professional Cyber genius ... once again i beat up my chest to confess that these group of cyber gurus are reliable and satisfactory with 100% reliability.....
-
18.02.26 00:01
Lilyfox
GENERAL HACKING AND CRYPTO RECOVERY SERVICES These group of CYBER GURUS below helped my family in recovering stolen bitcoin worth of $168,000 USD by scammers and they also helped me in securing a university title in one of the best university in the world I'm saying a very big thank you to them contact them now ; [email protected] or WhatsApp +447476606228 -Recovery of funds from fake platform/BINARY TRADING - Retrieval of fraudulent funds - Bank Transfer service - BITCOIN TOP UP - Money, recovery from any country in the world - Change of university degrees - Spying of all social media account within - Sales of Blank ATM and Credit Cards - Sales of university Titles originals. - Clearing of bank debts - University title offer and so many others ... Despite all odds these internet gurus have proven themselves worthy to be called a professional Cyber genius ... once again i beat up my chest to confess that these group of cyber gurus are reliable and satisfactory with 100% reliability.....
-
18.02.26 03:23
walterlindahi9
This past January, my world came crashing down. I lost nearly $42,000 of my hard-earned savings to a sophisticated Solana-based crypto scam. At first, it all seemed legitimate: sleek website, professional whitepaper, even glowing testimonials from “investors.” I’d done my homework, or so I thought. The promise of high returns in a volatile market felt like my ticket to financial freedom. For the first few months, everything appeared to be working. My portfolio showed steady gains. I remember checking my wallet balance daily, feeling a mix of pride and relief. I’ve cracked the code to building real wealth. Then, without warning, the platform vanished. Wallet addresses went dead. Support channels disappeared, and my funds were gone in an instant. The emotional fallout was worse than the financial loss. Sleepless nights became the norm. Anxiety gnawed at me constantly. I replayed every decision in my head, blaming myself for being naive. I vowed never to trust anyone again, not influencers, not experts, not even my own judgment. But giving up wasn’t an option. I owed it to myself and to my future to fight back. So I began digging. I scoured Reddit threads, filed reports with blockchain analytics firms, and even contacted local authorities (though they offered little help). The more I searched, the more overwhelmed I became, lost in a labyrinth of technical jargon, dead ends, and predatory recovery services asking for upfront fees. Then, through a survivor’s forum, I stumbled upon TechY Force Cyber Retrieval. Skeptical but desperate, I reached out. What set them apart wasn’t just their expertise; it was their empathy. They didn’t make wild promises. Instead, they walked me through how crypto tracing works, what success looks like, and what realistic timelines are. No pressure. No false hope. Within weeks, their forensic team identified transaction trails linked to the scam wallet. Using on-chain analysis and coordination with exchanges, they flagged suspicious activity and initiated recovery protocols. It wasn’t magic, but it was methodical, transparent, and grounded in real blockchain intelligence. Today, I’m cautiously optimistic. While not all funds have been recovered yet, TechY Force has already secured a significant portion and, more importantly, restored my sense of agency. I’m sleeping again. I’m healing. If you’ve been scammed, know this: you’re not alone, and you’re not foolish. Crypto fraud preys on hope, but that same hope can fuel your comeback. Don’t suffer in silence. Reach out. Ask questions. And never let a scammer steal your future along with your funds. WhatsApp +1(561) 726 3697 Mail. Techyforcecyberretrieval(@)consultant(.)com Telegram (@)TechCyberforc
-
22.02.26 03:48
harristhomas7376
"In the crypto world, this is great news I want to share. Last year, I fell victim to a scam disguised as a safe investment option. I have invested in crypto trading platforms for about 10yrs thinking I was ensuring myself a retirement income, only to find that all my assets were either frozen, I believed my assets were secure — until I discovered that my BTC funds had been frozen and withdrawals were impossible. It was a devastating moment when I realized I had been scammed, and I thought my Bitcoin was gone forever, Everything changed when a close friend recommended the Capital Crypto Recover Service. Their professionalism, expertise, and dedication enabled me to recover my lost Bitcoin funds back — more than €560.000 DEM to my BTC wallet. What once felt impossible became a reality thanks to their support. If you have lost Bitcoin through scams, hacking, failed withdrawals, or similar challenges, don’t lose hope. I strongly recommend Capital Crypto Recover Service to anyone seeking a reliable and effective solution for recovering any wallet assets. They have a proven track record of successful reputation in recovering lost password assets for their clients and can help you navigate the process of recovering your funds. Don’t let scammers get away with your hard-earned money – contact Email: [email protected] Phone CALL/Text Number: +1 (336) 390-6684 Contact: [email protected] Website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
22.02.26 03:49
harristhomas7376
"In the crypto world, this is great news I want to share. Last year, I fell victim to a scam disguised as a safe investment option. I have invested in crypto trading platforms for about 10yrs thinking I was ensuring myself a retirement income, only to find that all my assets were either frozen, I believed my assets were secure — until I discovered that my BTC funds had been frozen and withdrawals were impossible. It was a devastating moment when I realized I had been scammed, and I thought my Bitcoin was gone forever, Everything changed when a close friend recommended the Capital Crypto Recover Service. Their professionalism, expertise, and dedication enabled me to recover my lost Bitcoin funds back — more than €560.000 DEM to my BTC wallet. What once felt impossible became a reality thanks to their support. If you have lost Bitcoin through scams, hacking, failed withdrawals, or similar challenges, don’t lose hope. I strongly recommend Capital Crypto Recover Service to anyone seeking a reliable and effective solution for recovering any wallet assets. They have a proven track record of successful reputation in recovering lost password assets for their clients and can help you navigate the process of recovering your funds. Don’t let scammers get away with your hard-earned money – contact Email: [email protected] Phone CALL/Text Number: +1 (336) 390-6684 Contact: [email protected] Website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
 22.02.26 18:58
Natasha Williams
22.02.26 18:58
Natasha Williams
I am Natasha Williams from Dallas. I want to share my testimony to encourage anyone who has ever fallen victim to a scam or fraud. Some time ago, I was defrauded by some fraudulent cryptocurrency investment organization online, I was a victim and I lost a huge amount of money, $382,000. I felt angry, disappointed and helpless but I refused to give up and stay calm. I came across this agency, GREAT WHIP RECOVERY CYBER SERVICES.. who helped people recover their money from scammers and the testimonies I saw were quite amazing. And I decided to contact them. I gathered every piece of evidence, chats, receipts, account details, and messages and reported the case to the agency, GREAT WHIP RECOVERY CYBER SERVICES. After 73hours of follow up and not losing faith, the fraudster was traced and held accountable and I recovered all my money back. I highly recommend, GREAT WHIP RECOVERY CYBER SERVICES agency if you have ever fallen victim to scammers, you can contact them. Website: https://greatwhiprecoveryc.wixsite.com/greatwhip-site email: [email protected] Call Line: +1(406)2729101
-
22.02.26 19:00
Natasha Williams
I am Natasha Williams from Dallas. I want to share my testimony to encourage anyone who has ever fallen victim to a scam or fraud. Some time ago, I was defrauded by some fraudulent cryptocurrency investment organization online, I was a victim and I lost a huge amount of money, $382,000. I felt angry, disappointed and helpless but I refused to give up and stay calm. I came across this agency, GREAT WHIP RECOVERY CYBER SERVICES.. who helped people recover their money from scammers and the testimonies I saw were quite amazing. And I decided to contact them. I gathered every piece of evidence, chats, receipts, account details, and messages and reported the case to the agency, GREAT WHIP RECOVERY CYBER SERVICES. After 73hours of follow up and not losing faith, the fraudster was traced and held accountable and I recovered all my money back. I highly recommend, GREAT WHIP RECOVERY CYBER SERVICES agency if you have ever fallen victim to scammers, you can contact them. Website: https://greatwhiprecoveryc.wixsite.com/greatwhip-site email: [email protected] Call Line: +1(406)2729101
-
23.02.26 23:26
chongfook
As cryptocurrencies continue to reshape global finance in 2026, the risks have never been higher. From sophisticated phishing campaigns to fake wallet apps and investment scams, millions of investors face the devastating reality of lost or stolen digital assets. When your crypto vanishes, panic sets in—and that's when fraudsters strike again, posing as "recovery experts" to exploit your vulnerability. CONTACTS US Techyforcecyberretrieval(@)consultant(.)com https(://)techyforcecyberretrieval(.)com But there's a legitimate path forward. TECHY FORCE CYBER RETRIEVAL stands as the industry's most trusted crypto recovery company, combining advanced blockchain forensics, global partnerships, and a client-centric approach to help victims reclaim what was stolen. --- Why Recovery Is Possible—With the Right Team Cryptocurrency's decentralized, pseudonymous nature makes asset recovery complex—but not impossible. The blockchain is transparent. Every transaction leaves a trail. The challenge isn't finding the funds—it's having the expertise to follow that trail through mixers, bridges, and exchange deposits before they disappear forever. That's where TECHY FORCE CYBER RETRIEVAL excels. --- Our Proven Recovery Framework We don't believe in shortcuts, false promises, or upfront fees. Our process is built on transparency, forensic precision, and real results. Here's how we work: 1. Case Intake & Initial Assessment You begin by submitting a detailed report: compromised wallet addresses, transaction IDs, timestamps, and any communication with scammers. Our intake team reviews your case within hours to determine immediate next steps. 2. Blockchain Forensic Analysis Our specialists deploy proprietary tracking tools to map the movement of your stolen assets across multiple blockchains. We identify laundering patterns, exchange deposit addresses, and potential freezing points—building a clear investigative roadmap. 3. Global Partner Coordination Through established relationships with regulated exchanges, DeFi protocols, and compliance teams worldwide, we initiate direct communication to flag suspicious transactions and request asset freezes where legally permissible. 4. Legal & Regulatory Engagement When necessary, we collaborate with legal partners and law enforcement agencies to strengthen recovery efforts—especially in cases involving large-scale hacks or organized fraud rings. 5. Recovery Execution & Fund Return Once assets are secured, they're transferred directly to a new, secure wallet of your choice. We never hold your funds. And critically, we operate on a success-only model. You pay nothing unless we recover your assets. 6. Post-Recovery Security Guidance Recovery is only half the battle. We provide personalized recommendations to secure your remaining holdings—from hardware wallet setup to phishing awareness training—so you can move forward with confidence. --- What Sets TECHY FORCE CYBER RETRIEVAL Apart While countless "recovery services" flood the internet, few deliver legitimate results. Here's why we're consistently rated the best crypto recovery company in 2026: - Zero Upfront Fees – We only succeed when you do. No hidden charges. No bait-and-switch tactics. - Advanced Blockchain Intelligence – Our forensic tools track assets across Bitcoin, Ethereum, Solana, and 50+ other networks. - Global Reach – Partnerships with exchanges and regulatory bodies in North America, Europe, and Asia maximize recovery odds. - Client-First Communication – Weekly updates. Clear timelines. No ghosting. - Proven Track Record – Hundreds of successful recoveries in 2025–2026, with millions returned to rightful owners. --- Emerging Trends in 2026: What Victims Need to Know The threat landscape evolves constantly. This year's biggest risks include: - AI-Powered Phishing: Scammers now use deepfake voice and video to impersonate support staff. - Cross-Chain Bridge Exploits: Funds moved between networks are increasingly targeted. - Fake Recovery Services: Fraudsters pose as legitimate firms—always verify credentials before sharing information. TECHY FORCE CYBER RETRIEVAL stays ahead of these threats, continuously updating our tools and strategies to protect and serve our clients. CONTACTS US Techyforcecyberretrieval(@)consultant(.)com https(://)techyforcecyberretrieval(.)com --- Your Next Step If you've lost crypto to a scam, hack, or forgotten credentials, don't let despair—or another fraudster—steal your second chance. TECHY FORCE CYBER RETRIEVAL is accessible, transparent, and ready to help. Reach out today. Let our experts assess your case—and show you that even in 2026, stolen crypto doesn't have to stay lost forever. — TECHY FORCE CYBER RETRIEVAL Advanced Forensics. Global Reach. Your Recovery.
-
24.02.26 15:31
[email protected]`
Like many others, I was drawn in by the allure of cryptocurrency and the promise of financial freedom. When I encountered a self-proclaimed "crypto guru" online, his confidence and flashy lifestyle convinced me that he held the key to success. Eager to learn, I parted with $15,000 for his exclusive course, believing it would grant me access to an elite trading group and lucrative market insights. Initially, my excitement was palpable; I truly thought I was on the verge of a breakthrough. However, that enthusiasm quickly curdled into dread. Once inside the group, the dynamic shifted from education to aggressive exploitation. Instead of genuine mentorship, members were relentlessly upsold on fake trading signals that yielded nothing but losses. The pressure escalated when we were encouraged to invest in a supposed "private pool," which required an additional, staggering access fee of $60,000. It was only as I began to notice glaring inconsistencies and a complete lack of real results among the members that the fog lifted. I realized I hadn't joined a community of traders; I had walked into a sophisticated trap designed specifically to prey on newcomers like myself. The realization that the promises of wealth and insider knowledge were nothing more than a façade left me feeling vulnerable, deceived, and financially devastated. The dream of easy returns had turned into a heavy burden of regret. Desperate for a solution and refusing to let the fraudsters win, I began searching for help. That is when I discovered DIGITAL LIGHT SOLUTION, a firm specializing in online fraud investigations. Reaching out to them was the turning point. Their team approached my case with professionalism and empathy, immediately understanding the complexity of the scam. They guided me through the investigation process, uncovering the layers of deception used by the "guru" and his network. Thanks to their expertise and relentless pursuit of justice, I was able to navigate the aftermath of this ordeal with clarity rather than confusion. While the experience was a harsh lesson, connecting with DIGITAL LIGHT SOLUTION restored my hope and proved that there are still allies ready to fight against online exploitation. If you find yourself in a similar situation, do not lose hope—seek professional help immediately. Contact them directly Website https://digitallightsolution.com/ Email — Digitallightsolution(At)qualityservice(DOT)com What's App — https://wa.link/989vlf
-
24.02.26 15:32
[email protected]`
Like many others, I was drawn in by the allure of cryptocurrency and the promise of financial freedom. When I encountered a self-proclaimed "crypto guru" online, his confidence and flashy lifestyle convinced me that he held the key to success. Eager to learn, I parted with $15,000 for his exclusive course, believing it would grant me access to an elite trading group and lucrative market insights. Initially, my excitement was palpable; I truly thought I was on the verge of a breakthrough. However, that enthusiasm quickly curdled into dread. Once inside the group, the dynamic shifted from education to aggressive exploitation. Instead of genuine mentorship, members were relentlessly upsold on fake trading signals that yielded nothing but losses. The pressure escalated when we were encouraged to invest in a supposed "private pool," which required an additional, staggering access fee of $60,000. It was only as I began to notice glaring inconsistencies and a complete lack of real results among the members that the fog lifted. I realized I hadn't joined a community of traders; I had walked into a sophisticated trap designed specifically to prey on newcomers like myself. The realization that the promises of wealth and insider knowledge were nothing more than a façade left me feeling vulnerable, deceived, and financially devastated. The dream of easy returns had turned into a heavy burden of regret. Desperate for a solution and refusing to let the fraudsters win, I began searching for help. That is when I discovered DIGITAL LIGHT SOLUTION, a firm specializing in online fraud investigations. Reaching out to them was the turning point. Their team approached my case with professionalism and empathy, immediately understanding the complexity of the scam. They guided me through the investigation process, uncovering the layers of deception used by the "guru" and his network. Thanks to their expertise and relentless pursuit of justice, I was able to navigate the aftermath of this ordeal with clarity rather than confusion. While the experience was a harsh lesson, connecting with DIGITAL LIGHT SOLUTION restored my hope and proved that there are still allies ready to fight against online exploitation. If you find yourself in a similar situation, do not lose hope—seek professional help immediately. Contact them directly Website https://digitallightsolution.com/ Email — Digitallightsolution(At)qualityservice(DOT)com What's App — https://wa.link/989vlf
-
26.02.26 16:29
michaeldavenport238
I was recently scammed out of $53,000 by a fraudulent Bitcoin investment scheme, which added significant stress to my already difficult health issues, as I was also facing cancer surgery expenses. Desperate to recover my funds, I spent hours researching and consulting other victims, which led me to discover the excellent reputation of Capital Crypto Recover, I came across a Google post It was only after spending many hours researching and asking other victims for advice that I discovered Capital Crypto Recovery’s stellar reputation. I decided to contact them because of their successful recovery record and encouraging client testimonials. I had no idea that this would be the pivotal moment in my fight against cryptocurrency theft. Thanks to their expert team, I was able to recover my lost cryptocurrency back. The process was intricate, but Capital Crypto Recovery's commitment to utilizing the latest technology ensured a successful outcome. I highly recommend their services to anyone who has fallen victim to cryptocurrency fraud. For assistance contact [email protected] and on Telegram OR Call Number +1 (336)390-6684 via email: [email protected] you can visit his website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
26.02.26 16:29
michaeldavenport238
I was recently scammed out of $53,000 by a fraudulent Bitcoin investment scheme, which added significant stress to my already difficult health issues, as I was also facing cancer surgery expenses. Desperate to recover my funds, I spent hours researching and consulting other victims, which led me to discover the excellent reputation of Capital Crypto Recover, I came across a Google post It was only after spending many hours researching and asking other victims for advice that I discovered Capital Crypto Recovery’s stellar reputation. I decided to contact them because of their successful recovery record and encouraging client testimonials. I had no idea that this would be the pivotal moment in my fight against cryptocurrency theft. Thanks to their expert team, I was able to recover my lost cryptocurrency back. The process was intricate, but Capital Crypto Recovery's commitment to utilizing the latest technology ensured a successful outcome. I highly recommend their services to anyone who has fallen victim to cryptocurrency fraud. For assistance contact [email protected] and on Telegram OR Call Number +1 (336)390-6684 via email: [email protected] you can visit his website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
 27.02.26 00:08
sanayoliver
27.02.26 00:08
sanayoliver
I spend my days studying the mysteries of the universe, delving into black holes, quantum mechanics, and the nature of time itself. But apparently, the real black hole I should have been concerned about was my own memory. I encrypted my Bitcoin wallet to keep it as secure as possible. The problem? I promptly forgot the password. Classic, right? It didn't help that this wasn't just pocket change I was dealing with. No, I had $190,000 in Bitcoin sitting in that wallet, and my mind had decided to take a vacation, leaving me with absolutely no idea what that password was. The panic set in fast. My brain, which could solve some of the most complex physics equations, couldn't remember a 12-character password. It felt like my entire financial future was being sucked into a black hole, one I'd created myself. Desperate, I tried everything. I thought I could outsmart the system, using every trick I could think of. I tried variations of passwords I thought I might have used, analyzing them through the lens of my own behavioral patterns. I even resorted to good ol' brute force, typing random combinations for hours, hoping that maybe, just maybe, my subconscious would strike gold. Spoiler alert: it didn't. Each failed attempt made me feel more and more like a genius who'd locked themselves out of their own universe. In a final act of desperation, admitting that theoretical physics couldn't crack my own encryption, I contacted TechY Force Cyber Retrieval. From the moment I reached out, the difference was night and day. While I had been flailing in the dark, they approached my case with a precision that rivaled the calculations I do daily. They didn't promise miracles; they promised a methodical, advanced recovery process. Within a surprisingly short timeframe, they utilized specialized tools to bypass the mental block I couldn't overcome. When they finally recovered the wallet and confirmed the full $190,000 was intact and accessible, the relief was indescribable. It was as if I had pulled my financial future back from the event horizon just before it was lost forever. To anyone thinking they are too smart to lose their keys, or too logical to make such a mistake: don't wait until you are staring into the abyss. If you find yourself in a situation where your own memory has become your greatest enemy, trust the experts at TechY Force Cyber Retrieval. They turned my personal black hole into a success story, proving that sometimes, even the brightest minds need a little help to find the light. REACH OUT TO THEM ON MAIL [email protected]
-
 27.02.26 02:04
elizabethmadison
27.02.26 02:04
elizabethmadison
My name is Elizabeth Madison currently living in New York. There was a time I felt completely broken. I had trusted a fraudulent bitcoin investment organization, who turned out to be a fraudster. I sent money, believing their sweet words and promises on the interest rate I will get back in return, only to realize later that I’ve been scammed. On the day of withdrawal there was no money in my account. The pain hit deep. I couldn’t sleep, I kept asking myself how I could have been so careless, meanwhile my mom was battling with a stroke and the expenses were too much. For days, I cried and blamed myself. The betrayal, the disappointment and my mom's health issues all of this stress made me want to give up on life. But one day, I decided that sitting in pain wouldn’t solve anything. I picked myself up and chose to fight for what I lost then I came across GREAT WHIP RECOVERY CYBER SERVICES and saw how he helped people recover their funds from online fraud. I emailed all the transactions and paperwork I had with the fraudulent organization and they helped me recover all my lost money in just five days. If you have ever fallen victim to scammers, contact GREAT WHIP RECOVERY CYBER SERVICES to help you recover every penny you have lost. (Text +1(406)2729101) (Website https://greatwhiprecoveryc.wixsite.com/greatwhip-site) (Email [email protected])
-
27.02.26 02:04
elizabethmadison
My name is Elizabeth Madison currently living in New York. There was a time I felt completely broken. I had trusted a fraudulent bitcoin investment organization, who turned out to be a fraudster. I sent money, believing their sweet words and promises on the interest rate I will get back in return, only to realize later that I’ve been scammed. On the day of withdrawal there was no money in my account. The pain hit deep. I couldn’t sleep, I kept asking myself how I could have been so careless, meanwhile my mom was battling with a stroke and the expenses were too much. For days, I cried and blamed myself. The betrayal, the disappointment and my mom's health issues all of this stress made me want to give up on life. But one day, I decided that sitting in pain wouldn’t solve anything. I picked myself up and chose to fight for what I lost then I came across GREAT WHIP RECOVERY CYBER SERVICES and saw how he helped people recover their funds from online fraud. I emailed all the transactions and paperwork I had with the fraudulent organization and they helped me recover all my lost money in just five days. If you have ever fallen victim to scammers, contact GREAT WHIP RECOVERY CYBER SERVICES to help you recover every penny you have lost. (Text +1(406)2729101) (Website https://greatwhiprecoveryc.wixsite.com/greatwhip-site) (Email [email protected])
-
27.02.26 15:57
luciajessy3
Don’t be deceived by different testimonies online that is most likely wrong. I have made use of several recovery options that got me disappointed at the end of the day but I must confess that the tech genius I eventually found is the best out here. It’s better you devise your time to find the valid professional that can help you recover your stolen or lost crypto such as bitcoins rather than falling victim of other amateur hackers that cannot get the job done. ADAMWILSON . TRADING @ CONSULTANT COM / is the most reliable and authentic blockchain tech expert you can work with to recover what you lost to scammers. They helped me get back on my feet and I’m very grateful for that. Contact their email today to recover your lost coins ASAP…
-
27.02.26 15:59
wendytaylor015
My name is Wendy Taylor, I'm from Los Angeles, i want to announce to you Viewer how Capital Crypto Recover help me to restore my Lost Bitcoin, I invested with a Crypto broker without proper research to know what I was hoarding my hard-earned money into scammers, i lost access to my crypto wallet or had your funds stolen? Don’t worry Capital Crypto Recover is here to help you recover your cryptocurrency with cutting-edge technical expertise, With years of experience in the crypto world, Capital Crypto Recover employs the best latest tools and ethical hacking techniques to help you recover lost assets, unlock hacked accounts, Whether it’s a forgotten password, Capital Crypto Recover has the expertise to help you get your crypto back. a security company service that has a 100% success rate in the recovery of crypto assets, i lost wallet and hacked accounts. I provided them the information they requested and they began their investigation. To my surprise, Capital Crypto Recover was able to trace and recover my crypto assets successfully within 24hours. Thank you for your service in helping me recover my $647,734 worth of crypto funds and I highly recommend their recovery services, they are reliable and a trusted company to any individuals looking to recover lost money. Contact email [email protected] OR Telegram @Capitalcryptorecover Call/Text Number +1 (336)390-6684 his contact: [email protected] His website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
27.02.26 15:59
wendytaylor015
My name is Wendy Taylor, I'm from Los Angeles, i want to announce to you Viewer how Capital Crypto Recover help me to restore my Lost Bitcoin, I invested with a Crypto broker without proper research to know what I was hoarding my hard-earned money into scammers, i lost access to my crypto wallet or had your funds stolen? Don’t worry Capital Crypto Recover is here to help you recover your cryptocurrency with cutting-edge technical expertise, With years of experience in the crypto world, Capital Crypto Recover employs the best latest tools and ethical hacking techniques to help you recover lost assets, unlock hacked accounts, Whether it’s a forgotten password, Capital Crypto Recover has the expertise to help you get your crypto back. a security company service that has a 100% success rate in the recovery of crypto assets, i lost wallet and hacked accounts. I provided them the information they requested and they began their investigation. To my surprise, Capital Crypto Recover was able to trace and recover my crypto assets successfully within 24hours. Thank you for your service in helping me recover my $647,734 worth of crypto funds and I highly recommend their recovery services, they are reliable and a trusted company to any individuals looking to recover lost money. Contact email [email protected] OR Telegram @Capitalcryptorecover Call/Text Number +1 (336)390-6684 his contact: [email protected] His website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
27.02.26 16:00
wendytaylor015
My name is Wendy Taylor, I'm from Los Angeles, i want to announce to you Viewer how Capital Crypto Recover help me to restore my Lost Bitcoin, I invested with a Crypto broker without proper research to know what I was hoarding my hard-earned money into scammers, i lost access to my crypto wallet or had your funds stolen? Don’t worry Capital Crypto Recover is here to help you recover your cryptocurrency with cutting-edge technical expertise, With years of experience in the crypto world, Capital Crypto Recover employs the best latest tools and ethical hacking techniques to help you recover lost assets, unlock hacked accounts, Whether it’s a forgotten password, Capital Crypto Recover has the expertise to help you get your crypto back. a security company service that has a 100% success rate in the recovery of crypto assets, i lost wallet and hacked accounts. I provided them the information they requested and they began their investigation. To my surprise, Capital Crypto Recover was able to trace and recover my crypto assets successfully within 24hours. Thank you for your service in helping me recover my $647,734 worth of crypto funds and I highly recommend their recovery services, they are reliable and a trusted company to any individuals looking to recover lost money. Contact email [email protected] OR Telegram @Capitalcryptorecover Call/Text Number +1 (336)390-6684 his contact: [email protected] His website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
27.02.26 16:01
luciajessy3
Don’t be deceived by different testimonies online that is most likely wrong. I have made use of several recovery options that got me disappointed at the end of the day but I must confess that the tech genius I eventually found is the best out here. It’s better you devise your time to find the valid professional that can help you recover your stolen or lost crypto such as bitcoins rather than falling victim of other amateur hackers that cannot get the job done. ADAMWILSON . TRADING @ CONSULTANT COM / is the most reliable and authentic blockchain tech expert you can work with to recover what you lost to scammers. They helped me get back on my feet and I’m very grateful for that. Contact their email today to recover your lost coins ASAP…
-
27.02.26 16:01
luciajessy3
Don’t be deceived by different testimonies online that is most likely wrong. I have made use of several recovery options that got me disappointed at the end of the day but I must confess that the tech genius I eventually found is the best out here. It’s better you devise your time to find the valid professional that can help you recover your stolen or lost crypto such as bitcoins rather than falling victim of other amateur hackers that cannot get the job done. ADAMWILSON . TRADING @ CONSULTANT COM / is the most reliable and authentic blockchain tech expert you can work with to recover what you lost to scammers. They helped me get back on my feet and I’m very grateful for that. Contact their email today to recover your lost coins ASAP…
-
27.02.26 16:01
luciajessy3
Don’t be deceived by different testimonies online that is most likely wrong. I have made use of several recovery options that got me disappointed at the end of the day but I must confess that the tech genius I eventually found is the best out here. It’s better you devise your time to find the valid professional that can help you recover your stolen or lost crypto such as bitcoins rather than falling victim of other amateur hackers that cannot get the job done. ADAMWILSON . TRADING @ CONSULTANT COM / is the most reliable and authentic blockchain tech expert you can work with to recover what you lost to scammers. They helped me get back on my feet and I’m very grateful for that. Contact their email today to recover your lost coins ASAP…
-
01.03.26 10:48
marcushenderson624
Bitcoin Recovery Testimonial After falling victim to a cryptocurrency scam group, I lost $354,000 worth of USDT. I thought all hope was lost from the experience of losing my hard-earned money to scammers. I was devastated and believed there was no way to recover my funds. Fortunately, I started searching for help to recover my stolen funds and I came across a lot of testimonials online about Capital Crypto Recovery, an agent who helps in recovery of lost bitcoin funds, I contacted Capital Crypto Recover Service, and with their expertise, they successfully traced and recovered my stolen assets. Their team was professional, kept me updated throughout the process, and demonstrated a deep understanding of blockchain transactions and recovery protocols. They are trusted and very reliable with a 100% successful rate record Recovery bitcoin, I’m grateful for their help and highly recommend their services to anyone seeking assistance with lost crypto. Contact: [email protected] Phone CALL/Text Number: +1 (336) 390-6684 Email: [email protected] Website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
01.03.26 10:48
marcushenderson624
Bitcoin Recovery Testimonial After falling victim to a cryptocurrency scam group, I lost $354,000 worth of USDT. I thought all hope was lost from the experience of losing my hard-earned money to scammers. I was devastated and believed there was no way to recover my funds. Fortunately, I started searching for help to recover my stolen funds and I came across a lot of testimonials online about Capital Crypto Recovery, an agent who helps in recovery of lost bitcoin funds, I contacted Capital Crypto Recover Service, and with their expertise, they successfully traced and recovered my stolen assets. Their team was professional, kept me updated throughout the process, and demonstrated a deep understanding of blockchain transactions and recovery protocols. They are trusted and very reliable with a 100% successful rate record Recovery bitcoin, I’m grateful for their help and highly recommend their services to anyone seeking assistance with lost crypto. Contact: [email protected] Phone CALL/Text Number: +1 (336) 390-6684 Email: [email protected] Website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
03.03.26 14:09
Thomas Muller
YOU CAN REACH OUT TO GREAT WHIP RECOVERY CYBER SERVICES FOR HELP TO RECOVER YOUR STOLEN BTC OR ETH BACK CALL:+1(406)2729101 I once fell victim to online investment scheme that cost me a devastating €254,000. I’m Thomas Muller from Berlin, Germany. The person I trusted turned out to be a fraud, and the moment I realized I’d been deceived, my entire world stopped. I immediately began searching for legitimate ways to recover my funds and hold the scammer accountable. During my search, I came across several testimonies of how Great Whip Recovery Cyber Services helped some people recover money they lost to cyber fraud, I contacted Great Whip Recovery Cyber Service team and provided all the evidence I had. Within about 36 hours, the experts traced the digital trail left by the fraudster, the individual was eventually tracked down and I recovered all my money back. You can contact them with, website https://greatwhiprecoveryc.wixsite.com/greatwhip-site text +1(406)2729101 email [email protected]
-
03.03.26 14:09
Thomas Muller
YOU CAN REACH OUT TO GREAT WHIP RECOVERY CYBER SERVICES FOR HELP TO RECOVER YOUR STOLEN BTC OR ETH BACK CALL:+1(406)2729101 I once fell victim to online investment scheme that cost me a devastating €254,000. I’m Thomas Muller from Berlin, Germany. The person I trusted turned out to be a fraud, and the moment I realized I’d been deceived, my entire world stopped. I immediately began searching for legitimate ways to recover my funds and hold the scammer accountable. During my search, I came across several testimonies of how Great Whip Recovery Cyber Services helped some people recover money they lost to cyber fraud, I contacted Great Whip Recovery Cyber Service team and provided all the evidence I had. Within about 36 hours, the experts traced the digital trail left by the fraudster, the individual was eventually tracked down and I recovered all my money back. You can contact them with, website https://greatwhiprecoveryc.wixsite.com/greatwhip-site text +1(406)2729101 email [email protected]
-
04.03.26 07:21
Jane4
I lost about $600k Bitcoin last year, I searched around and tried to work with some recovery firm unfortunately I was scammed as well. This happened for months until I came across [email protected] They came to my rescue and all my funds were recovered within few days I'm so happy right now .
-
04.03.26 07:22
Jane4
I lost about $600k Bitcoin last year, I searched around and tried to work with some recovery firm unfortunately I was scammed as well. This happened for months until I came across [email protected] They came to my rescue and all my funds were recovered within few days I'm so happy right now .
-
04.03.26 12:25
patricialovick86
How To Recover Your Bitcoin Without Falling Victim To Scams: A Testimony Experience With Capital Crypto Recover Services, Contact Telegram: @Capitalcryptorecover Dear Everyone, I would like to take a moment to share my positive experience with Capital Crypto Recover Services. Initially, I was unsure if it would be possible to recover my stolen bitcoins. However, with their expertise and professionalism, I was able to fully recover my funds. Unfortunately, many individuals fall victim to scams in the cryptocurrency space, especially those involving fraudulent investment platforms. However, I advise caution, as not all recovery services are legitimate. I personally lost $273,000 worth of Bitcoin from my Binance account due to a deceptive platform. If you have suffered a similar loss, you may be considering crypto recovery, The Capital Crypto Recover is the most knowledgeable and effective Capital Crypto Recovery Services assisted me in recovering my stolen funds within 24 hours, after getting access to my wallet. Their service was not only prompt but also highly professional and effective, and many recovery services may not be trustworthy. Therefore, I highly recommend Capital Crypto Recover to you. i do always research and see reviews about their service, For assistance finding your misplaced cryptocurrency, get in touch with them, They do their jobs quickly and excellently, Stay safe and vigilant in the crypto world. Contact: [email protected] You can reach them via email at [email protected] OR Call/Text Number +1 (336)390-6684 his contact website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
04.03.26 12:25
patricialovick86
How To Recover Your Bitcoin Without Falling Victim To Scams: A Testimony Experience With Capital Crypto Recover Services, Contact Telegram: @Capitalcryptorecover Dear Everyone, I would like to take a moment to share my positive experience with Capital Crypto Recover Services. Initially, I was unsure if it would be possible to recover my stolen bitcoins. However, with their expertise and professionalism, I was able to fully recover my funds. Unfortunately, many individuals fall victim to scams in the cryptocurrency space, especially those involving fraudulent investment platforms. However, I advise caution, as not all recovery services are legitimate. I personally lost $273,000 worth of Bitcoin from my Binance account due to a deceptive platform. If you have suffered a similar loss, you may be considering crypto recovery, The Capital Crypto Recover is the most knowledgeable and effective Capital Crypto Recovery Services assisted me in recovering my stolen funds within 24 hours, after getting access to my wallet. Their service was not only prompt but also highly professional and effective, and many recovery services may not be trustworthy. Therefore, I highly recommend Capital Crypto Recover to you. i do always research and see reviews about their service, For assistance finding your misplaced cryptocurrency, get in touch with them, They do their jobs quickly and excellently, Stay safe and vigilant in the crypto world. Contact: [email protected] You can reach them via email at [email protected] OR Call/Text Number +1 (336)390-6684 his contact website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
06.03.26 13:36
CARL9090
In January, my life shifted in a way I never expected. I clicked a trading link given to me by someone I found on Telegram, believing it was legitimate. It looked professional. It felt secure. I trusted it. Until I tried to withdraw my money. Within seconds, everything was gone, transferred into a wallet claiming account without a trace. That was the moment the truth hit me: I had been scammed. The emotional fallout was brutal. For weeks, I couldn’t even speak about it. I thought people would judge me. I thought they’d say I should have known better. Then someone stepped in who changed everything Agent Jasmine Lopez ,She listened without judgment. She treated my fear as real and valid. She traced patterns, uncovered off-chain indicators, and identified wallet clusters linked to a larger scam network. She showed me that what happened wasn’t random it was organized and intentional. For the first time, I felt hope. Hearing that students, parents, and hardworking people had been targeted the same way made me realize this wasn’t stupidity. It was predation. We weren’t careless we were deliberately targeted and manipulated I’m still healing. The experience changed me. But it also reminded me that even in your darkest moment, there can be someone willing to shine a light. Contact her at [email protected] WHATSAPP +44 7478077894
-
07.03.26 07:46
Jane4
I lost about $600k Bitcoin last year, I searched around and tried to work with some recovery firm unfortunately I was scammed as well. This happened for months until I came across [email protected] They came to my rescue and all my funds were recovered within few days I'm so happy right now .
-
07.03.26 07:46
Jane4
I lost about $600k Bitcoin last year, I searched around and tried to work with some recovery firm unfortunately I was scammed as well. This happened for months until I came across [email protected] They came to my rescue and all my funds were recovered within few days I'm so happy right now .
-
07.03.26 08:39
Jane4
I lost about $600k Bitcoin last year, I searched around and tried to work with some recovery firm unfortunately I was scammed as well. This happened for months until I came across [email protected] They came to my rescue and all my funds were recovered within few days I'm so happy right now .
-
07.03.26 08:55
Jane4
I lost about $600k Bitcoin last year, I searched around and tried to work with some recovery firm unfortunately I was scammed as well. This happened for months until I came across [email protected] They came to my rescue and all my funds were recovered within few days I'm so happy right now .
-
07.03.26 09:40
Alena76
Most people have been scammed severally and they give up on their funds I'm saying these because I was a victim too After loosing 745,000 USD I lose my mind until I read about COIN HACK RECOVERY I decided to contact the company on: [email protected] and I'm glad I made the decision not to give up. they helped me to recover all my lost funds within two days.
-
07.03.26 10:37
Alena76
Most people have been scammed severally and they give up on their funds I'm saying these because I was a victim too After loosing 745,000 USD I lose my mind until I read about COIN HACK RECOVERY I decided to contact the company on: [email protected] and I'm glad I made the decision not to give up. they helped me to recover all my lost funds within two days.
-
07.03.26 10:37
Alena76
Most people have been scammed severally and they give up on their funds I'm saying these because I was a victim too After loosing 745,000 USD I lose my mind until I read about COIN HACK RECOVERY I decided to contact the company on: [email protected] and I'm glad I made the decision not to give up. they helped me to recover all my lost funds within two days.
-
07.03.26 17:49
Natasha Williams
I am Natasha Williams from Dallas. I want to share my testimony to encourage anyone who has ever fallen victim to a scam or fraud. Some time ago, I was defrauded by some fraudulent cryptocurrency investment organization online, I was a victim and I lost a huge amount of money, $382,000. I felt angry, disappointed and helpless but I refused to give up and stay calm. I came across this agency, GREAT WHIP RECOVERY CYBER SERVICES.. who helped people recover their money from scammers and the testimonies I saw were quite amazing. And I decided to contact them. I gathered every piece of evidence, chats, receipts, account details, and messages and reported the case to the agency, GREAT WHIP RECOVERY CYBER SERVICES. After 73hours of follow up and not losing faith, the fraudster was traced and held accountable and I recovered all my money back. I highly recommend, GREAT WHIP RECOVERY CYBER SERVICES agency if you have ever fallen victim to scammers, you can contact them. Website: https://greatwhiprecoveryc.wixsite.com/greatwhip-site email: [email protected] Call Line: +1(406)2729101
-
07.03.26 20:10
ericbank61
I never thought I’d be the one writing one of these stories. You hear about crypto scams, hacks, and lost fortunes, and you think, “That’s for other people. The careless ones.” I was careful. Or so I believed. It started with a sophisticated phishing attack. An email that looked identical to a legitimate exchange notification, a link to “verify my wallet security,” and a moment of distracted panic. I clicked. Within hours, my life savings in Bitcoin—a sum I’d been accumulating for five years—vanished from my private wallet. The transaction hash was a cold, unfeeling tombstone on the blockchain. My stomach dropped into a void. I felt physically ill. The police filed a report, but their knowledge ended at the edge of traditional finance. The exchange offered sympathy but no solutions. I was adrift, utterly hopeless. After weeks of despair, scouring forums in the dead of night, I found a thread mentioning Mighty Hacker Recovery. The name sounded almost too bold, like something from a cheesy movie. But the testimonials were detailed, sober, and from people who sounded just like me: desperate, betrayed, and out of options. With nothing left to lose, I reached out. Their intake process was professional but guarded. They asked for transaction IDs, wallet addresses, and a detailed timeline—no promises, just facts. A consultant named Leo became my point of contact. He had a calm, analytical voice that cut through my panic. “We don’t hack *into* systems,” he explained. “We follow the digital trail. We analyze the attack vector, trace the flow of funds through the blockchain’s transparency, and identify the weak points in the scammer’s own security. Sometimes, it’s about speed and outmaneuvering them before they can launder the assets.” What followed was a tense, silent partnership. I provided every shred of information I had, while Leo’s team worked in the shadows. There were days of silence that felt like years. Then, an update: they’d traced my BTC to a mixing service, a tool scammers use to obfuscate the trail. Mighty Hacker Recovery used advanced blockchain forensic techniques to peel back those layers. They discovered the scammer had made a critical error—a small portion of the funds was sent to a KYC-compliant exchange wallet. That was the chink in the armor. Using the immutable evidence from the blockchain and legal pressure channels they’d established with certain international platforms, they initiated a recovery claim. The process was complex, involving digital affidavits and proof of illicit origin. Three weeks after my first desperate email, Leo called. “We’ve secured a freeze on the destination wallet. The exchange is cooperating. We’re initiating the reversal.” I didn’t dare believe it until I saw it. Two days later, my wallet balance updated. My Bitcoin, minus Mighty Hacker Recovery’s contingency fee, was back. The relief wasn’t euphoric; it was a deep, trembling exhaustion, like waking up from a nightmare. They didn’t perform magic. They applied intense expertise, relentless persistence, and an intricate understanding of both the blockchain’s weaknesses and a scammer’s psychology. They gave me back more than my crypto; they gave me back a sense of agency in a landscape designed to make victims feel powerless. If you’re reading this from your own private hell of loss, know this: the trail never truly disappears. You just need the right team to follow it. For me, that was Mighty Hacker Recovery.
-
07.03.26 22:44
robertalfred175
CRYPTO SCAM RECOVERY SUCCESSFUL – A TESTIMONIAL OF LOST PASSWORD TO YOUR DIGITAL WALLET BACK. My name is Robert Alfred, Am from Australia. I’m sharing my experience in the hope that it helps others who have been victims of crypto scams. A few months ago, I fell victim to a fraudulent crypto investment scheme linked to a broker company. I had invested heavily during a time when Bitcoin prices were rising, thinking it was a good opportunity. Unfortunately, I was scammed out of $120,000 AUD and the broker denied me access to my digital wallet and assets. It was a devastating experience that caused many sleepless nights. Crypto scams are increasingly common and often involve fake trading platforms, phishing attacks, and misleading investment opportunities. In my desperation, a friend from the crypto community recommended Capital Crypto Recovery Service, known for helping victims recover lost or stolen funds. After doing some research and reading multiple positive reviews, I reached out to Capital Crypto Recovery. I provided all the necessary information—wallet addresses, transaction history, and communication logs. Their expert team responded immediately and began investigating. Using advanced blockchain tracking techniques, they were able to trace the stolen Dogecoin, identify the scammer’s wallet, and coordinate with relevant authorities to freeze the funds before they could be moved. Incredibly, within 24 hours, Capital Crypto Recovery successfully recovered the majority of my stolen crypto assets. I was beyond relieved and truly grateful. Their professionalism, transparency, and constant communication throughout the process gave me hope during a very difficult time. If you’ve been a victim of a crypto scam, I highly recommend them with full confidence contacting: Email: [email protected] Telegram: @Capitalcryptorecover Contact: [email protected] Call/Text: +1 (336) 390-6684 Website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
07.03.26 22:44
robertalfred175
CRYPTO SCAM RECOVERY SUCCESSFUL – A TESTIMONIAL OF LOST PASSWORD TO YOUR DIGITAL WALLET BACK. My name is Robert Alfred, Am from Australia. I’m sharing my experience in the hope that it helps others who have been victims of crypto scams. A few months ago, I fell victim to a fraudulent crypto investment scheme linked to a broker company. I had invested heavily during a time when Bitcoin prices were rising, thinking it was a good opportunity. Unfortunately, I was scammed out of $120,000 AUD and the broker denied me access to my digital wallet and assets. It was a devastating experience that caused many sleepless nights. Crypto scams are increasingly common and often involve fake trading platforms, phishing attacks, and misleading investment opportunities. In my desperation, a friend from the crypto community recommended Capital Crypto Recovery Service, known for helping victims recover lost or stolen funds. After doing some research and reading multiple positive reviews, I reached out to Capital Crypto Recovery. I provided all the necessary information—wallet addresses, transaction history, and communication logs. Their expert team responded immediately and began investigating. Using advanced blockchain tracking techniques, they were able to trace the stolen Dogecoin, identify the scammer’s wallet, and coordinate with relevant authorities to freeze the funds before they could be moved. Incredibly, within 24 hours, Capital Crypto Recovery successfully recovered the majority of my stolen crypto assets. I was beyond relieved and truly grateful. Their professionalism, transparency, and constant communication throughout the process gave me hope during a very difficult time. If you’ve been a victim of a crypto scam, I highly recommend them with full confidence contacting: Email: [email protected] Telegram: @Capitalcryptorecover Contact: [email protected] Call/Text: +1 (336) 390-6684 Website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
11.03.26 19:43
Michael Jensen
With the help and expertise of CapitalNode Analytics, i was able to get back my digital tokens from a fake investment platform. They are swift, precise and transparent in their operations.
-
12.03.26 15:04
Mike Franz
I recently ran into a serious issue with my cryptocurrency account that left me unable to access my bitcoin wallet. After several failed login attempts and repeated blocks from the system, I began to worry that I might lose access to my $415,000 permanently. Determined to fix the problem, After spending hours reading a review of GREAT WHIP RECOVERY CYBER SERVICES, on how they successfully assisted countless individuals in similar situations as mine. The process was stressful, but eventually the issue was resolved and I was able to regain access to my bitcoin wallet account. I’m immensely grateful to GREAT WHIP RECOVERY CYBER SERVICES for their incredible work, for those who need help, you can contact through the following channels: Phone Call: +1(406)2729101 Website: https://greatwhiprecoveryc.wixsite.com/greatwhip-site Mail: [email protected]
-
12.03.26 15:05
Mike Franz
I recently ran into a serious issue with my cryptocurrency account that left me unable to access my bitcoin wallet. After several failed login attempts and repeated blocks from the system, I began to worry that I might lose access to my $415,000 permanently. Determined to fix the problem, After spending hours reading a review of GREAT WHIP RECOVERY CYBER SERVICES, on how they successfully assisted countless individuals in similar situations as mine. The process was stressful, but eventually the issue was resolved and I was able to regain access to my bitcoin wallet account. I’m immensely grateful to GREAT WHIP RECOVERY CYBER SERVICES for their incredible work, for those who need help, you can contact through the following channels: Phone Call: +1(406)2729101 Website: https://greatwhiprecoveryc.wixsite.com/greatwhip-site Mail: [email protected]
-
15.03.26 20:22
harristhomas7376
"In the crypto world, this is great news I want to share. Last year, I fell victim to a scam disguised as a safe investment option. I have invested in crypto trading platforms for about 10yrs thinking I was ensuring myself a retirement income, only to find that all my assets were either frozen, I believed my assets were secure — until I discovered that my BTC funds had been frozen and withdrawals were impossible. It was a devastating moment when I realized I had been scammed, and I thought my Bitcoin was gone forever, Everything changed when a close friend recommended the Capital Crypto Recover Service. Their professionalism, expertise, and dedication enabled me to recover my lost Bitcoin funds back — more than €560.000 DEM to my BTC wallet. What once felt impossible became a reality thanks to their support. If you have lost Bitcoin through scams, hacking, failed withdrawals, or similar challenges, don’t lose hope. I strongly recommend Capital Crypto Recover Service to anyone seeking a reliable and effective solution for recovering any wallet assets. They have a proven track record of successful reputation in recovering lost password assets for their clients and can help you navigate the process of recovering your funds. Don’t let scammers get away with your hard-earned money – contact Email: [email protected] Phone CALL/Text Number: +1 (336) 390-6684 Contact: [email protected] Website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
15.03.26 20:22
harristhomas7376
"In the crypto world, this is great news I want to share. Last year, I fell victim to a scam disguised as a safe investment option. I have invested in crypto trading platforms for about 10yrs thinking I was ensuring myself a retirement income, only to find that all my assets were either frozen, I believed my assets were secure — until I discovered that my BTC funds had been frozen and withdrawals were impossible. It was a devastating moment when I realized I had been scammed, and I thought my Bitcoin was gone forever, Everything changed when a close friend recommended the Capital Crypto Recover Service. Their professionalism, expertise, and dedication enabled me to recover my lost Bitcoin funds back — more than €560.000 DEM to my BTC wallet. What once felt impossible became a reality thanks to their support. If you have lost Bitcoin through scams, hacking, failed withdrawals, or similar challenges, don’t lose hope. I strongly recommend Capital Crypto Recover Service to anyone seeking a reliable and effective solution for recovering any wallet assets. They have a proven track record of successful reputation in recovering lost password assets for their clients and can help you navigate the process of recovering your funds. Don’t let scammers get away with your hard-earned money – contact Email: [email protected] Phone CALL/Text Number: +1 (336) 390-6684 Contact: [email protected] Website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
15.03.26 20:22
harristhomas7376
"In the crypto world, this is great news I want to share. Last year, I fell victim to a scam disguised as a safe investment option. I have invested in crypto trading platforms for about 10yrs thinking I was ensuring myself a retirement income, only to find that all my assets were either frozen, I believed my assets were secure — until I discovered that my BTC funds had been frozen and withdrawals were impossible. It was a devastating moment when I realized I had been scammed, and I thought my Bitcoin was gone forever, Everything changed when a close friend recommended the Capital Crypto Recover Service. Their professionalism, expertise, and dedication enabled me to recover my lost Bitcoin funds back — more than €560.000 DEM to my BTC wallet. What once felt impossible became a reality thanks to their support. If you have lost Bitcoin through scams, hacking, failed withdrawals, or similar challenges, don’t lose hope. I strongly recommend Capital Crypto Recover Service to anyone seeking a reliable and effective solution for recovering any wallet assets. They have a proven track record of successful reputation in recovering lost password assets for their clients and can help you navigate the process of recovering your funds. Don’t let scammers get away with your hard-earned money – contact Email: [email protected] Phone CALL/Text Number: +1 (336) 390-6684 Contact: [email protected] Website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
16.03.26 12:01
[email protected]
I would like to highly recommend TOP RECOVERY EXPERT, the best in cryptocurrency recovery. I want the world to know how exceptional their services are. For years, I faced a very difficult time after being scammed out of $453,000 in Ethereum. It was devastating to realize that someone could steal from me without remorse after I trusted them. Determined to recover my funds legally, I began searching for reliable help and came across TOP RECOVERY EXPERT, the most professional recovery service I have ever found. With their expertise and support, I was able to recover my entire Ethereum wallet. I now understand that while many investment opportunities can seem too good to be true, professional guidance can make all the difference. Thanks to TOP RECOVERY EXPERT, I have regained not only my assets ETH but also my peace of mind and happiness. Their dedication and professionalism have truly changed my life. I am now the happiest person I have ever been, all because of their help. If you have been a victim of a crypto scam, I strongly advise you to reach out to TOP RECOVERY EXPERT. Contact Information: Text/Call: +1 (346) 980-9102 Email: [email protected] For more information visit his website: https://toprecoveryexpert2.wixsite.com/consultant
-
16.03.26 13:20
luciajessy3
There are many recommendations online, but not all of them are trustworthy. Unfortunately, some so-called “recovery services” are scams themselves and may try to take advantage of people who have already lost money. If you’ve been scammed, be extremely cautious about anyone promising guaranteed recovery — especially if they ask for upfront fees. Always do thorough research, verify credentials, and consider reporting the incident to. Cyberrefundexperts {A} Consultant {.} Com , Stay alert and protect yourself.
-
16.03.26 13:20
luciajessy3
There are many recommendations online, but not all of them are trustworthy. Unfortunately, some so-called “recovery services” are scams themselves and may try to take advantage of people who have already lost money. If you’ve been scammed, be extremely cautious about anyone promising guaranteed recovery — especially if they ask for upfront fees. Always do thorough research, verify credentials, and consider reporting the incident to. Cyberrefundexperts @ Consultant . Com , Stay alert and protect yourself.
-
18.03.26 15:27
keithwilson9899
ETHEREUM RECOVERY ASSISTANCE: CAPITAL CRYPTO RECOVER HELPED ME RECOVER $98,000 WORTH OF LOST ETH In cases of cryptocurrency scams, having accurate information and trusted support is essential. I would like to recommend Capital Crypto Recover Service, a professional team that specializes in assisting individuals with the recovery of lost or stolen Bitcoin and Ethereum (ETH). Their experienced experts are dedicated to helping victims of digital asset fraud by carefully analyzing each case, developing strategic recovery plans, Capital Crypto Recover Service knowledgeable team's primary goals are to satisfy clients and offer significant support and working diligently toward fund retrieval. The team is committed to providing reliable assistance and maintaining a high level of client satisfaction. Based on my assessment, their reputation professionalism and a strong commitment to their clients. If you have experienced a cryptocurrency loss, you can contacting them for further assistance Phone (Call/Text): +1 (336) 390-6684 Email: [email protected] Alternate Email: [email protected] Website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
18.03.26 15:27
keithwilson9899
ETHEREUM RECOVERY ASSISTANCE: CAPITAL CRYPTO RECOVER HELPED ME RECOVER $98,000 WORTH OF LOST ETH In cases of cryptocurrency scams, having accurate information and trusted support is essential. I would like to recommend Capital Crypto Recover Service, a professional team that specializes in assisting individuals with the recovery of lost or stolen Bitcoin and Ethereum (ETH). Their experienced experts are dedicated to helping victims of digital asset fraud by carefully analyzing each case, developing strategic recovery plans, Capital Crypto Recover Service knowledgeable team's primary goals are to satisfy clients and offer significant support and working diligently toward fund retrieval. The team is committed to providing reliable assistance and maintaining a high level of client satisfaction. Based on my assessment, their reputation professionalism and a strong commitment to their clients. If you have experienced a cryptocurrency loss, you can contacting them for further assistance Phone (Call/Text): +1 (336) 390-6684 Email: [email protected] Alternate Email: [email protected] Website: https://recovercapital.wixsite.com/capital-crypto-rec-1
-
08:03
Alena76
Most people have been scammed severally and they give up on their funds I'm saying these because I was a victim too After loosing 745,000 USD I lose my mind until I read about COIN HACK RECOVERY I decided to contact the company on: [email protected] and I'm glad I made the decision not to give up. they helped me to recover all my lost funds within two days.
-
08:04
Alena76
Most people have been scammed severally and they give up on their funds I'm saying these because I was a victim too After loosing 745,000 USD I lose my mind until I read about COIN HACK RECOVERY I decided to contact the company on: [email protected] and I'm glad I made the decision not to give up. they helped me to recover all my lost funds within two days.
-
08:15
Alena76
Most people have been scammed severally and they give up on their funds I'm saying these because I was a victim too After loosing 745,000 USD I lose my mind until I read about COIN HACK RECOVERY I decided to contact the company on: [email protected] and I'm glad I made the decision not to give up. they helped me to recover all my lost funds within two days.
Для участия в Чате вам необходим бесплатный аккаунт pro-blockchain.com
Войти
Регистрация
Авторизация
Регистрация
Похожие новости
Как работает трансформер (LLM)
19 мар. 2026 г.На бирже Grinex теперь можно пополнить счет банковской картой
19 мар. 2026 г.
Подпишись на telegram канал и узнавай первым обо всех новостях